建筑设计人工智能论文参考
需积分: 6 48 浏览量
2023-01-27
22:03:18
上传
评论
收藏 24.18MB PDF 举报


Building-GAN: Graph-Conditioned Architectural Volumetric Design Generation
Kai-Hung Chang
*
1
, Chin-Yi Cheng
*
1
, Jieliang Luo
1
, Shingo Murata
2
, Mehdi Nourbakhsh
1
, and
Yoshito Tsuji
2
1
Autodesk Research, United States
2
Obayashi AI Design Lab, Japan
Abstract
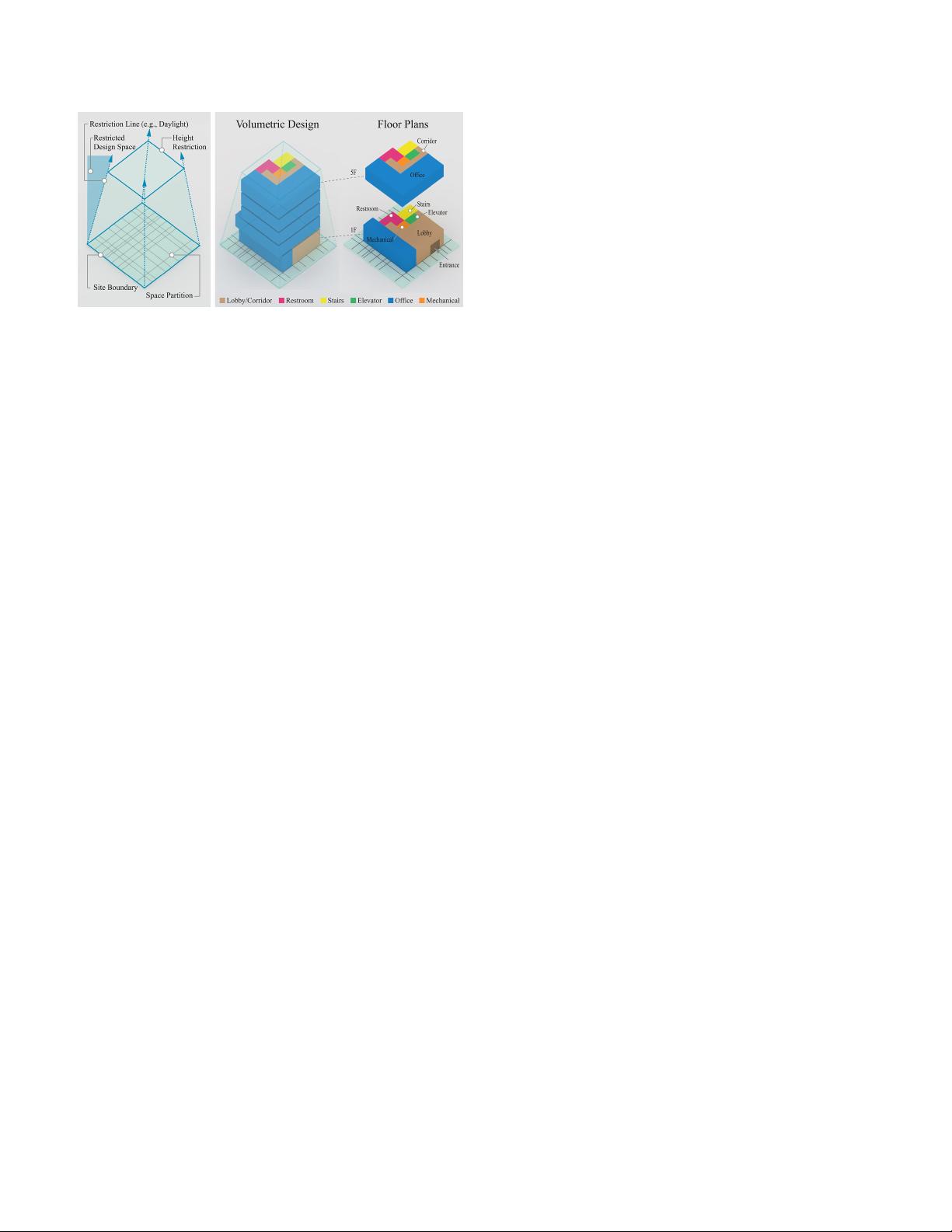
Volumetric design is the first and critical step for pro-
fessional building design, where architects not only depict
the rough 3D geometry of the building but also specify the
programs to form a 2D layout on each floor. Though 2D
layout generation for a single story has been widely studied,
there is no developed method for multi-story buildings. This
paper focuses on volumetric design generation conditioned
on an input program graph. Instead of outputting dense 3D
voxels, we propose a new 3D representation named voxel
graph that is both compact and expressive for building ge-
ometries. Our generator is a cross-modal graph neural
network that uses a pointer mechanism to connect the in-
put program graph and the output voxel graph, and the
whole pipeline is trained using the adversarial framework.
The generated designs are evaluated qualitatively by a user
study and quantitatively using three metrics: quality, diver-
sity, and connectivity accuracy. We show that our model
generates realistic 3D volumetric designs and outperforms
previous methods and baselines.
1. Introduction
Volumetric design (also called massing design or
schematic design) is the first step when an architect designs
a building on a given land site. Based on the local building
codes applied to the site, the building can only be designed
within a valid design space, which is usually not a regular
cuboid. For instance, the daylight restrictions prevent the
building from casting too much shadow over its neighboring
building by drawing a slant line as upper bound. Within the
valid design space, a volumetric design not only depicts the
volumetric 3D shape of the building, but also produces 2D
program layouts for each story. An example is illustrated in
Figure 2. The architect then uses the finalized volumetric
*
Contributed equally.
Figure 1. Our model takes in a program graph (also called bubble
diagram) and a design space in voxel graph representation, and
outputs a variety of volumetric designs. Professional architects
can convert the output into detailed building design efficiently.
design to gradually develop all the details for construction,
including fac¸ade design, interior design, structure systems,
etc. While volumetric design is the foundation of the design
and construction process, making a good volumetric design
usually requires a significant amount of time and effort. An
efficient pipeline to generate volumetric design will bring a
great impact on the architecture and construction industry.
Generating realistic 2D room layouts has been a pop-
ular topic for many years. Existing methods include
arXiv:2104.13316v1 [cs.LG] 27 Apr 2021



剩余23页未读,继续阅读
资源评论













