

International Journal of Computer Vision 29(1), 5–28 (1998)
c
° 1998 Kluwer Academic Publishers. Manufactured in The Netherlands.
CONDENSATION—Conditional Density Propagation for Visual Tracking
MICHAEL ISARD AND ANDREW BLAKE
Department of Engineering Science, University of Oxford, Oxford OX1 3PJ, UK
Received July 16, 1996; Accepted March 3, 1997
Abstract. The problem of tracking curves in dense visual clutter is challenging. Kalman filtering is inadequate
because itis based on Gaussian densities which, being unimodal, cannotrepresent simultaneousalternative hypothe-
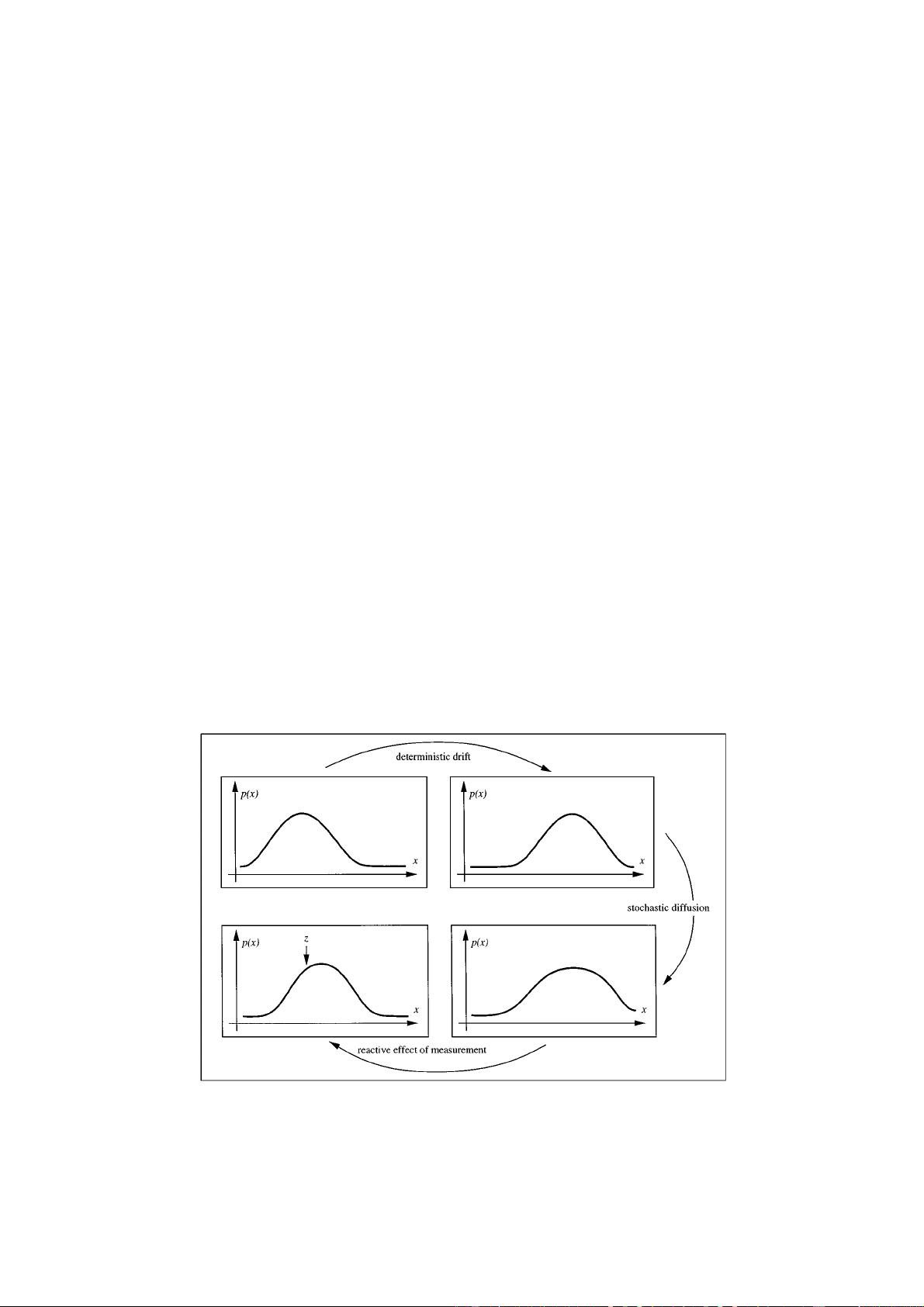
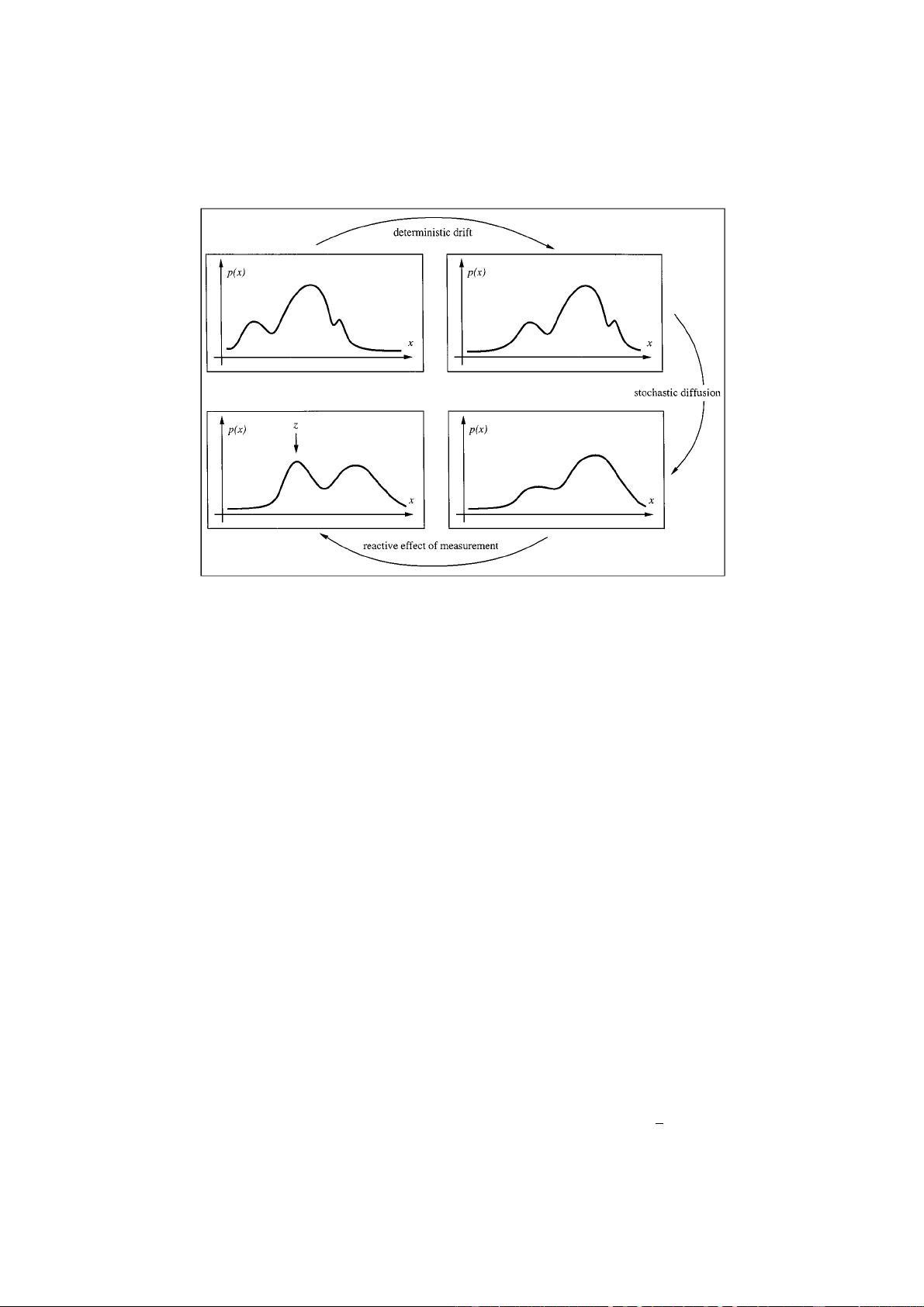
ses. The Condensation algorithm uses “factored sampling”, previously applied to the interpretation of static
images, in which the probability distribution of possible interpretations is represented by a randomly generated set.
Condensation uses learned dynamical models, together with visual observations, to propagate the random set
over time. The result is highly robust tracking of agile motion. Notwithstanding the use of stochastic methods, the
algorithm runs in near real-time.
1. Tracking Curves in Clutter
The purpose of this paper
1
is to establish a stochas-
tic framework for tracking curves in visual clutter, us-
ing a sampling algorithm. The approach is rooted in
ideas from statistics, control theory and computer vi-
sion. The problem is to track outlines and features of
foreground objects, modelled as curves, as they move
in substantial clutter, and to do it at, or close to, video
frame-rate. This is challenging because elements in
the background clutter may mimic parts of foreground
features. In the most severe case of camouflage, the
background may consist of objects similar to the fore-
ground object, for instance, when a person is moving
past a crowd. Our approach aims to dissolve the result-
ing ambiguity by applying probabilistic models of ob-
ject shapeand motionto analyse the video-stream. The
degree of generality of these models is pitched care-
fully: sufficiently specific for effective disambiguation
but sufficiently general to be broadly applicable over
entire classes of foreground objects.
1.1. Modelling Shape and Motion
Effective methods have arisen in computer vision for
modelling shape and motion. When suitable geometric
models of a moving object are available, they can be
matched effectively to image data, though usually at
considerable computational cost (Hogg, 1983; Lowe,
1991; Sullivan, 1992; Huttenlocher et al., 1993). Once
an object has been located approximately, tracking it
insubsequent images becomesmoreefficientcomputa-
tionally (Lowe, 1992), especially if motion is modelled
as well as shape (Gennery, 1992; Harris, 1992). One
important facility is the modelling of curve segments
which interact with images (Fischler and Elschlager,
1973; Yuille and Hallinan, 1992) or image sequences
(Kass et al., 1987; Dickmanns, and Graefe, 1988).
This is more general than modelling entire objects but
more clutter-resistant than applying signal-processing
to low-level corners or edges. The methods to be dis-
cussed here have been applied at this level, to segments
of parametric B-spline curves (Bartels et al., 1987)
tracking over image sequences (Menet et al., 1990;
Cipolla and Blake, 1990). The B-spline curves could,
in theory, be parameterised by their control points. In
practice, this allows too many degrees of freedom for
stable tracking and it is necessary to restrict the curve
to a low-dimensional parameter x, for example, over
an affine space (Koenderink and Van Doorn, 1991;
Ullman and Basri, 1991; Blake et al., 1993), or more
generally allowing a “shape-space” of non-rigid mo-
tion (Cootes et al., 1993).

剩余23页未读,继续阅读
资源评论













