1332 IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 56, NO. 5, MAY 2021
A 77-GHz 8RX3TX Transceiver for 250-m
Long-Range Automotive Radar in 40-nm
CMOS Technology
Tomoyuki Arai , Member, IEEE, Tatsunori Usugi, Member, IEEE, Tomotoshi Murakami, Member, IEEE,
Shuya Kishimoto
, Member, IEEE, Yoshiyuki Utagawa , Masato Kohtani , Member, IEEE,
Ikuma Ando, Member, IEEE, Kazuhiro Matsunaga, Chihiro Arai
, and Shinji Yamaura, Member, IEEE
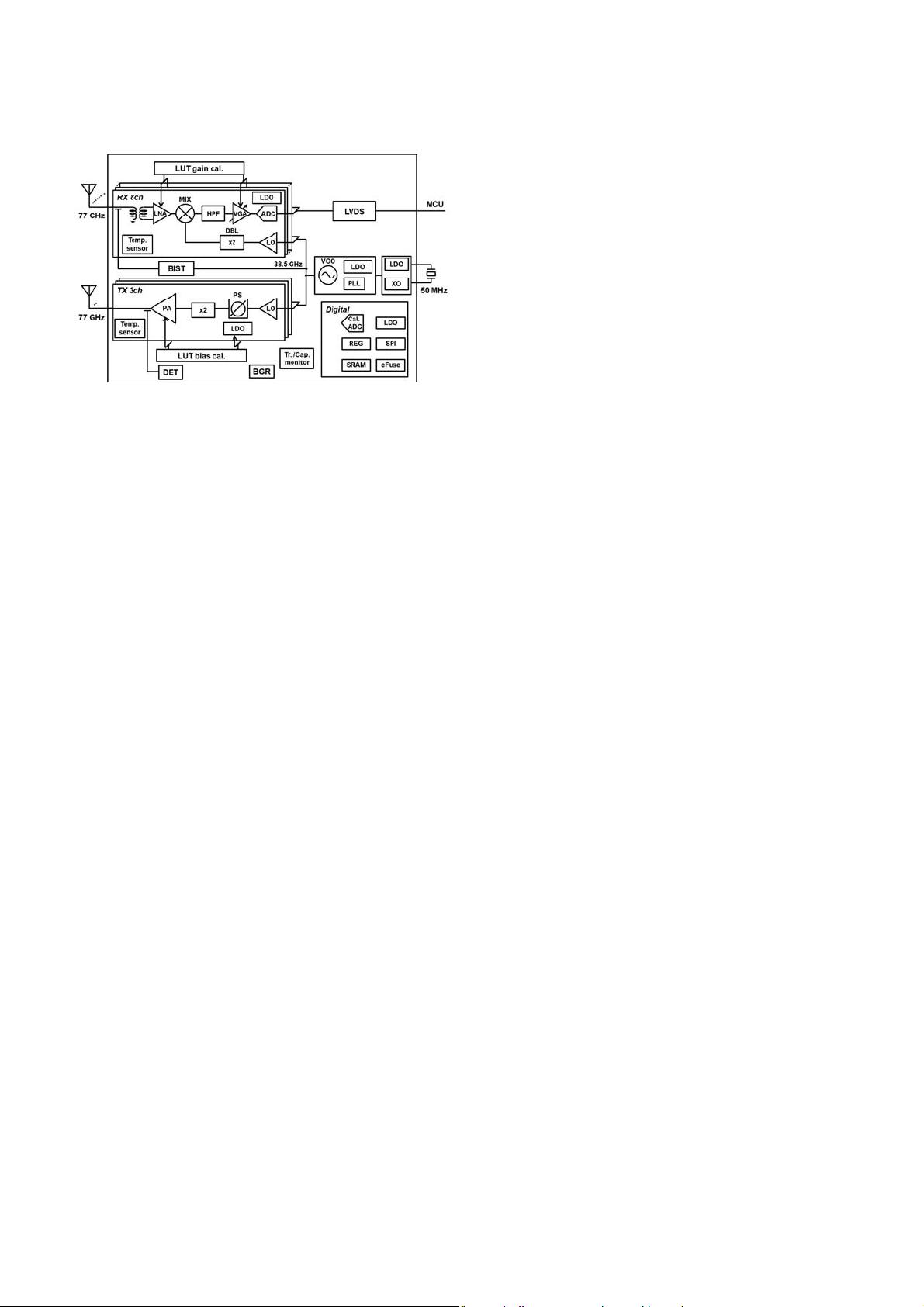
Abstract— An automotive 77-GHz long-range radar (LRR)
with an 8-channel receiver (RX) and a 3-channel transmitter (TX)
in 40-nm CMOS technology is presented. It integrates a 38.5-GHz
phase-locked loop (PLL), a transmitter power detector (DET)
and power calibration loop, a crystal oscillator (XO), built-in-
self-test (BIST) circuits, an SRAM, an eFuse, a temperature
compensation calibration loop with a lookup table (LUT) and
a temperature sensor, a serial peripheral interface (SPI), and
a multiple-input multiple-output (MIMO) control logic. The
receiver shows a noise figure (NF) of 8.7 dB and input-referred
1-dB compression point (IP1-dB) of −7.4 dBm. The NF and
IP1-dB under the worst conditions are 14 dB and −10 dBm,
respectively. The transmitter shows output power of 14.1 dBm
and phase noise of −116 dBc/Hz at a 12.5-MHz offset frequency,
which corresponds to the frequency of 250-m objects for the
fast-chirp frequency-modulated continuous wave (FMCW) radar.
The proposed radar module utilizes two transmitter channels for
horizontal detection. A 2 × 8 time-division-multiplexing MIMO
(TDM-MIMO) technique provides a detection range of 250 m.
Index Terms— Automotive, CMOS, frequency-modulated con-
tinuous wave (FMCW), long-range radar (LRR), mm-wave,
multiple-input multiple-output (MIMO), noise figure (NF),
process, supply voltage, and temperature (PVT).
I. INTRODUCTION
D
UE to its robust ability to detect objects, automo-
tive radar is a key sensing technology for achieving
advanced driver assistance systems for autonomous vehicles.
These systems measure distance and speed at the same time
in extreme light, temperature, and visibility environments.
For reliable systems for autonomous vehicles, there is a
growing demand for sensors with longer detection ranges,
higher range resolutions of distant objects, and more precise
direction-of-arrival (DOA) [1]–[3] estimation [4]–[6]. The
frequency band of 76–77 GHz is dedicated for long-range
Manuscript received October 6, 2020; revised November 21, 2020 and
December 26, 2020; accepted December 28, 2020. Date of publication
January 20, 2021; date of current version April 23, 2021. This article was
approved by Associate Editor Mohyee Mikhemar. (Corresponding author:
Tomoyuki Arai.)
Tomoyuki Arai, Tatsunori Usugi, Tomotoshi Murakami, Yoshiyuki Utagawa,
Ikuma Ando, Kazuhiro Matsunaga, and Chihiro Arai are with DENSO Cor-
poration, Aichi 448-8661, Japan (e-mail: tomoyuki.arai.j6f@jp.denso.com).
Shuya Kishimoto, Masato Kohtani, and Shinji Yamaura are with MIRISE
Technologies Corporation, Tokyo 108-0075, Japan.
Color versions of one or more figures in this article are available at
https://doi.org/10.1109/JSSC.2021.3050306.
Digital Object Identifier 10.1109/JSSC.2021.3050306
radar (LRR) and the frequency band of 77–81 GHz is ded-
icated for middle-range radar (MRR) and short-range radar
(SRR) [7], [8]. MRR and SRR require capabilities that include
accurate and high-resolution recognition of distance, velocity,
and direction from the vehicle. It is also expected that angular
information will be required of LRR, as the determination that
an object is located in the same lane of the road is critical for
reliable high-speed driving [9]. This leads to the requirement
for multiple-input multiple-output (MIMO) capabilities of the
LRR system in order to enhance the angular resolution. MIMO
radars based on a multichannel transceiver that improve the
maximum detection range and the accuracy of DOA estima-
tion have been proposed [10], [11]. The adoption of those
millimeter-wave frequency bands provides wider frequency
modulation bandwidths for higher range resolution, and the
shorter wavelength leads to higher integration.
Therefore, receivers with a low noise figure (NF) and high
linearity, transmitters with sufficient output power, and MIMO
capabilities are crucial characteristics for realizing a 77-GHz
LRR [12]–[14]. To achieve higher output saturation power and
power gain and a lower NF, it is necessary to adopt advanced
CMOS technologies [15]–[21]. Moreover, the MIMO tech-
nique requires highly integrated baseband signal processing,
thus advanced CMOS technology is indispensable for realizing
LRRs.
Since the radar sensing information about objects sur-
rounding the vehicle is the basis of autonomous driving,
robustness in the face of device process, supply voltage, and
temperature (PVT) variation is a critical requirement for radar
transceivers.
In this work, an 8-receiver architecture is adopted to obtain
higher MIMO capabilities in a single chip, instead of applying
a cascading architecture. This was done because sharing the
local (LO) signal between two chips consumes more power for
LO distribution and a single chip enables an accurate and reli-
able synchronization of all the receiver channels. The real-only
baseband is employed to reduce the area [22], [23], instead
of using a complex baseband [13]. The LO signal frequency
is also an important design parameter. There are multiple
methods to achieve this, such as direct signal delivery [15]
and using 1/4 of the transmission frequency [13] or 1/5 of the
desired frequency LO with a subharmonic quadrature injec-
tion lock oscillator as a ×5 frequency multiplier [24]–[28].
0018-9200 © 2021 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.
See https://www.ieee.org/publications/rights/index.html for more information.