
西安建筑科技大学课程设计(论文)任务书
专业班级: 学生姓名: 指导教师(签名):
一、课程设计(论文)题目
电梯门控计算机控制系统设计
二、本次课程设计(论文)应达到的目的
1、理解电梯门控计算机控制系统的的数学模型与工作原理。
2、掌握控制方法的选择对系统的快速性和抗干扰性的影响。
3、利用 MATLAB 的 Simulink 仿真工具设计速度和电流数字调节器。
4、掌握计算机控制仿真结果的分析方法。
5、编写算法MATLAB/simulink仿真程序实现
三、本次课程设计(论文)任务的主要内容和要求(包括原始数据、技术
参数、设计要求等)
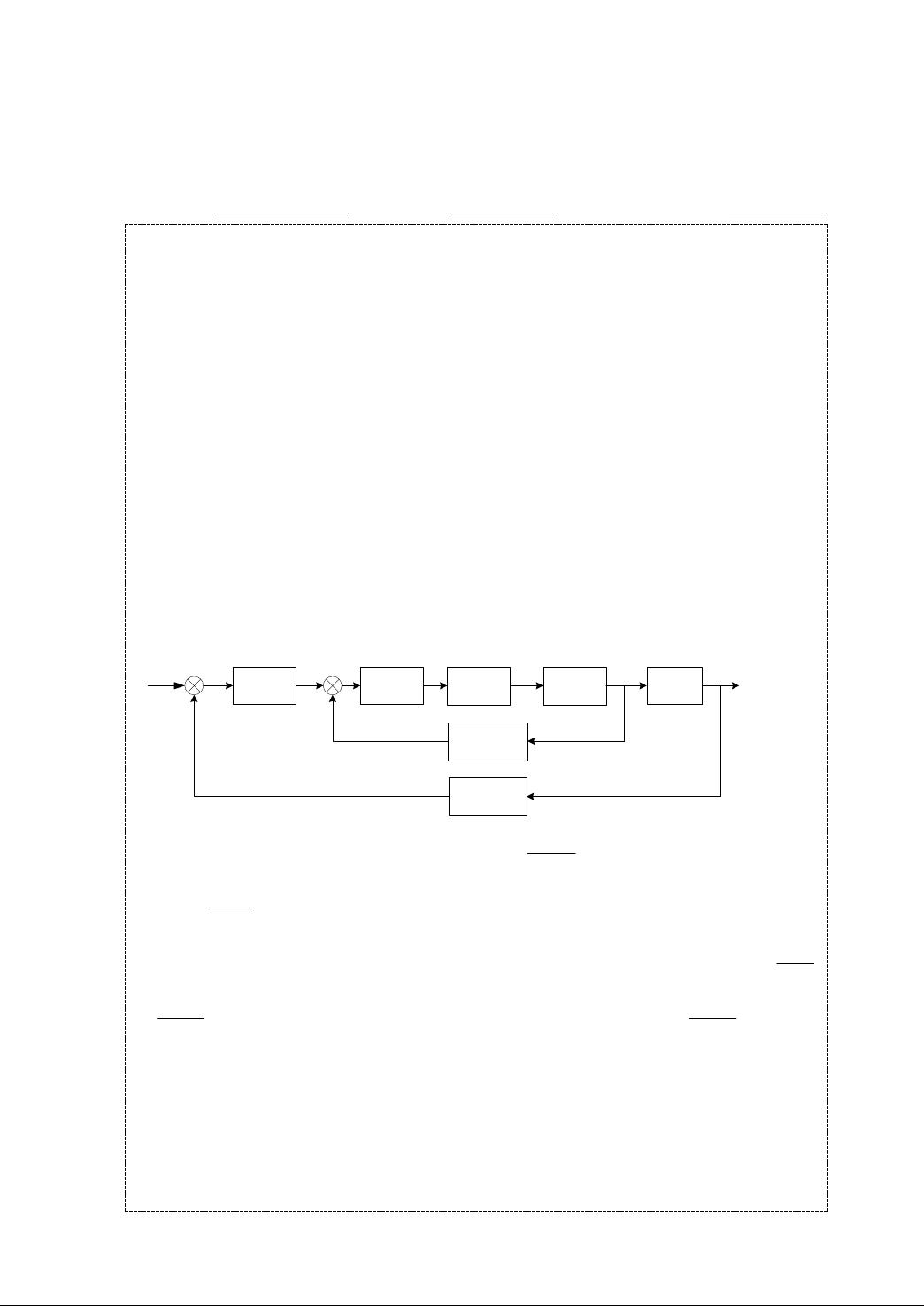
在电机门控计算机控制系统一般采取如下的控制方法:
变流器
异步
电机
电流
调节器
速度
调节器
电流采样
速度采样
零阶
保持器
设 : 异 步 电 机 的 传 递 函 数 为 :
1
1
( )
2 1
G s
s
=
+
, 变 流 器 的 传 递 函 数 为 :
2
1
( )
5 1
G s
s
=
+
,考虑到信号采集及 AD 转换的延迟以及滤波的作用,反馈通道相当
于一阶惯性环节,电流采样反馈通道和速度采样反馈通道的传递函数分别为:
1
1s +
和
1
5 1s +
。施加在异步电动机上的干扰通道的传递函数为:
3
( )
5 1
s
n
G s e
s
-
=
+
。试:
1、简述系统的基本结构与工作原理。
2、根据系统的特点,从理论上分析该系统应采取什么控制方法可以保证系统的快速
性和抗干扰性。
3、能够运用 MATLAB 的 Simulink 仿真工具设计速度和电流数字调节器,并对系统
资源评论


墨痕_777
- 粉丝: 4097
- 资源: 753











