学位论文-—基于plcs7300的步进电机开环设计.doc
135 浏览量
2023-07-01
16:07:49
上传
评论
收藏 778KB DOC 举报


0
目录
目录....................................................................................1
1.引言..................................................................................2
1.1 设计目的........................................................................2
1.2 设计过程........................................................................2
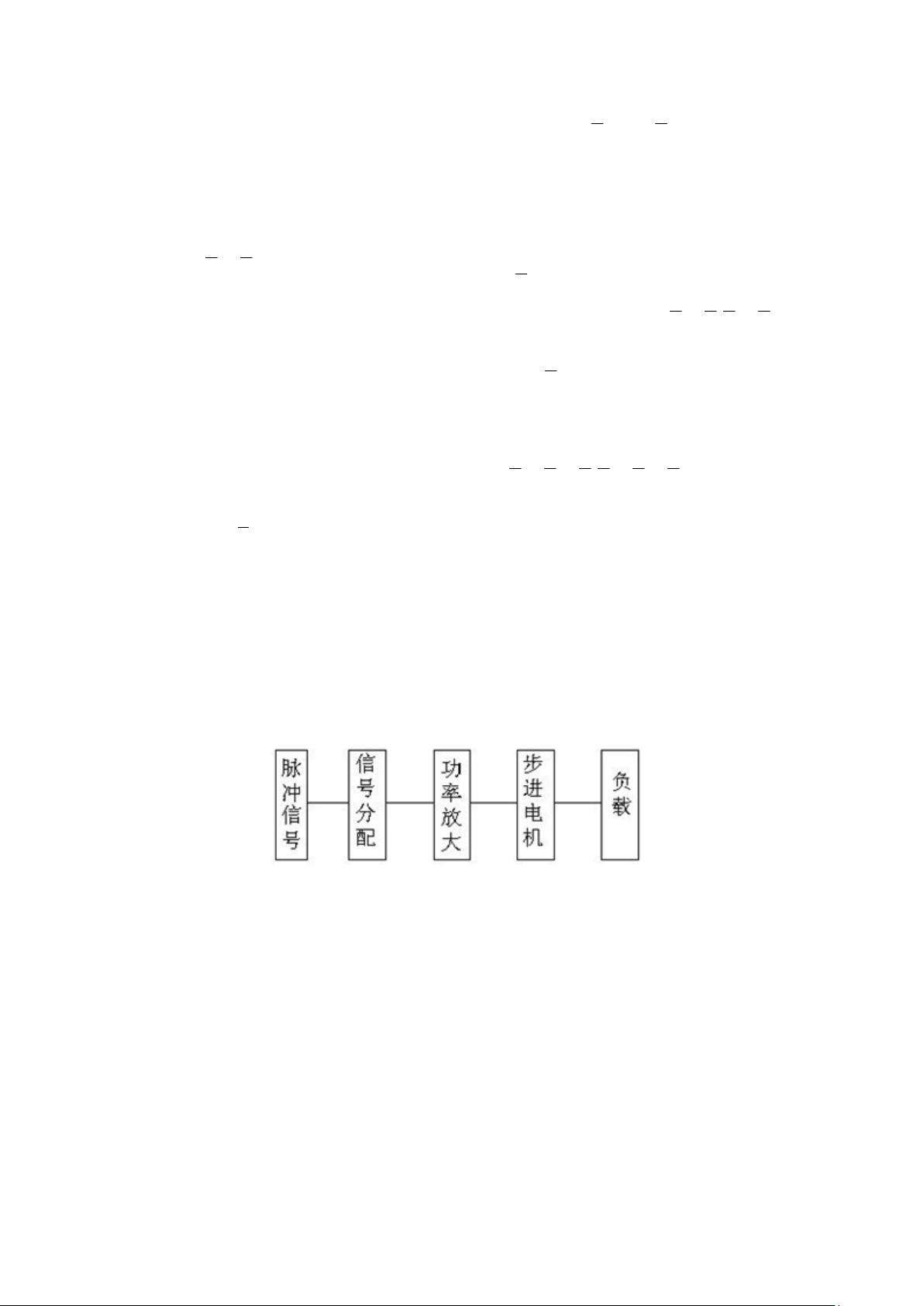
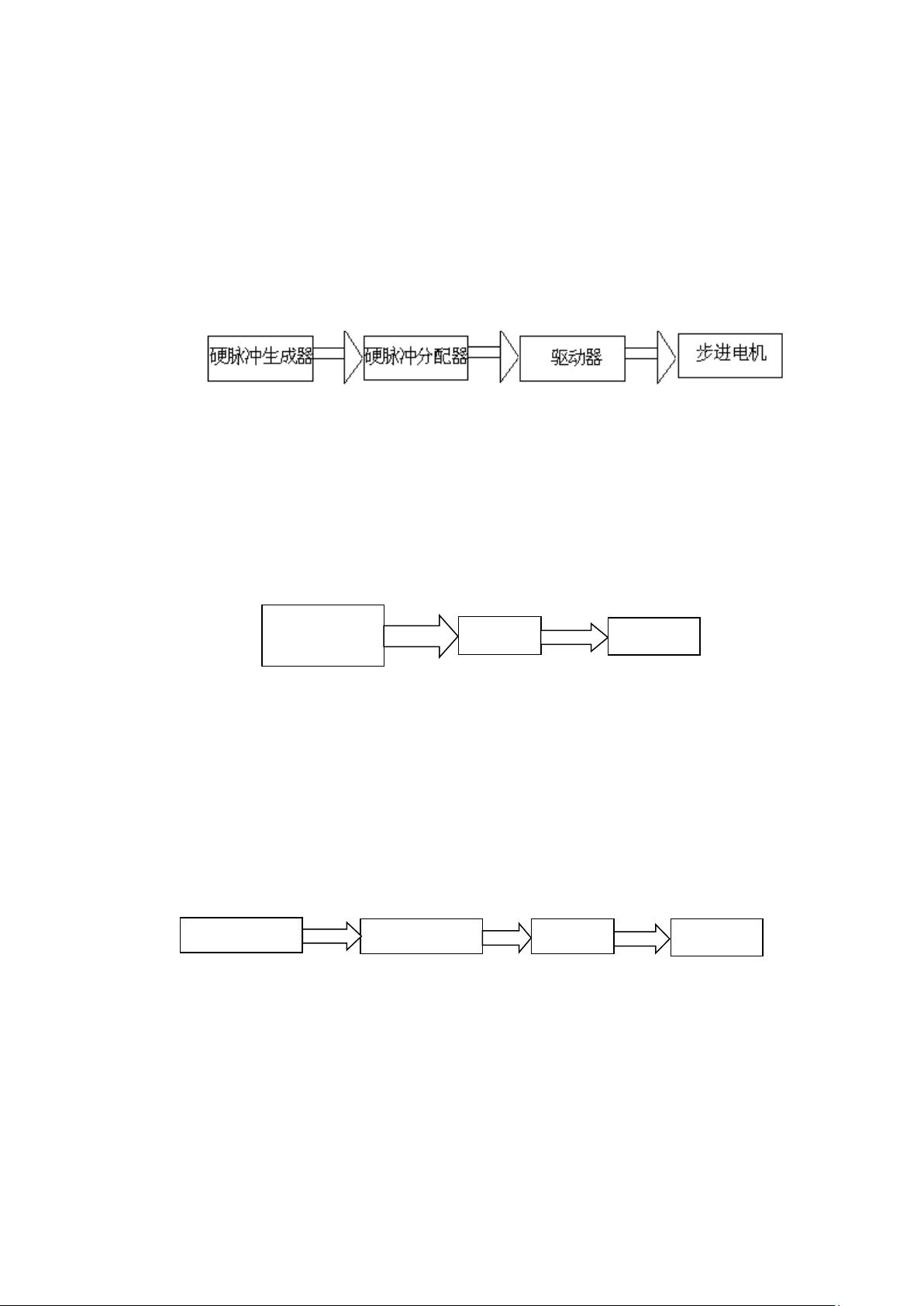
1.2.1 步进电机简介.............................................................2
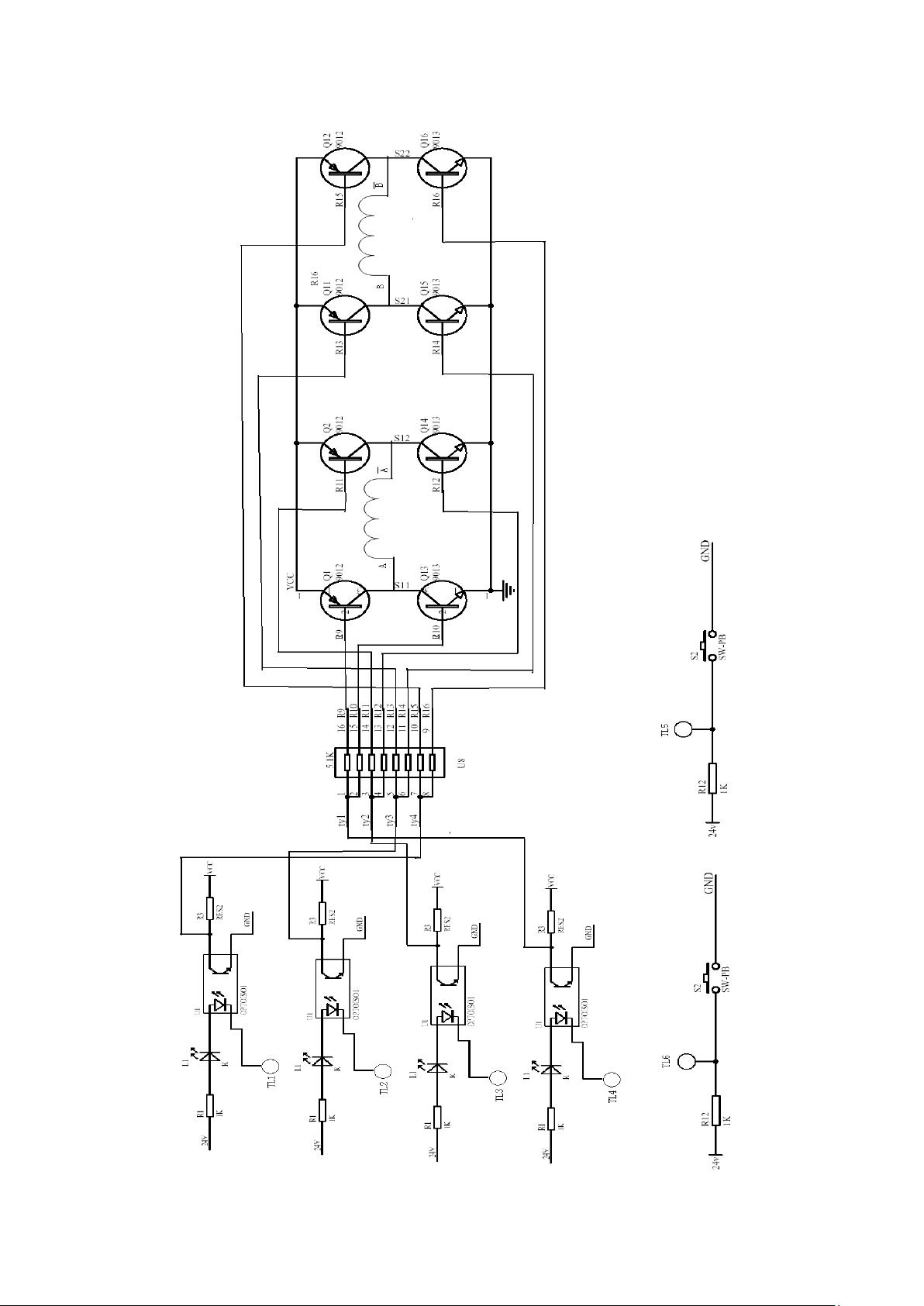
1.2.2 步进电机的驱动电路.......................................................2
1.2.3 两相步进电机的通电方式...................................................4
1.3 设计内容........................................................................5
2.电路设计..............................................................................6
3.PLC 硬件组态 ..........................................................................6
4.PLC 编程元件地址分配表 ................................................................6
4.1 线性化编程符号表................................................................6
4.2 结构化编程符号表................................................................7
4.3 结构化编程 FC 的变量声明表.......................................................7
5.控制程序..............................................................................8
5.1 线性化编程 ......................................................................8
5.2 结构化编程 .....................................................................21
5.2.1 OB1 控制程序 .............................................................21
5.2.2 FC1 控制程序 .............................................................25
5.2.3 FC2 控制程序 .............................................................27
6.程序调试说明.........................................................................30
7.心得体会.............................................................................30
8.参考文献.............................................................................31

剩余30页未读,继续阅读
资源评论


黑色的迷迭香
- 粉丝: 715
- 资源: 4万+









最新资源
- Yolov8改进---注意力机制:Polarized Self-Attention,效果秒杀CBAM、SE.html
- 人才网站设计-asp.net+sql-(系统源码)
- asp.net+sql人才网站设计-含系统源码
- C#应用的用户配置窗体方案
- python实现绘制爱心图形的代码
- JAVAWEB项目-校园订餐系统项目源码.zip
- flink-1.19.0-bin-scala-2.12.tgz flink-1.16.3-bin-scala-2.12.tgz
- javaWeb项目-物资管理系统项目源码.zip
- javaweb项目-物流配货项目源码.zip
- 使用C++基于颜色纹理特征的人脸活体检测实现-附项目源码.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


