异步电机矢量控制Matlab仿真实验(矢量控制部分).doc
119 浏览量
2022-11-29
05:35:17
上传
评论
收藏 1003KB DOC 举报


武汉理工大学《电力拖动自动控制系统——运动控制》课程设计说明书
目录
1 设计任务及要求......................................................................................................1
2 异步电动机数学模型基本原理..............................................................................1
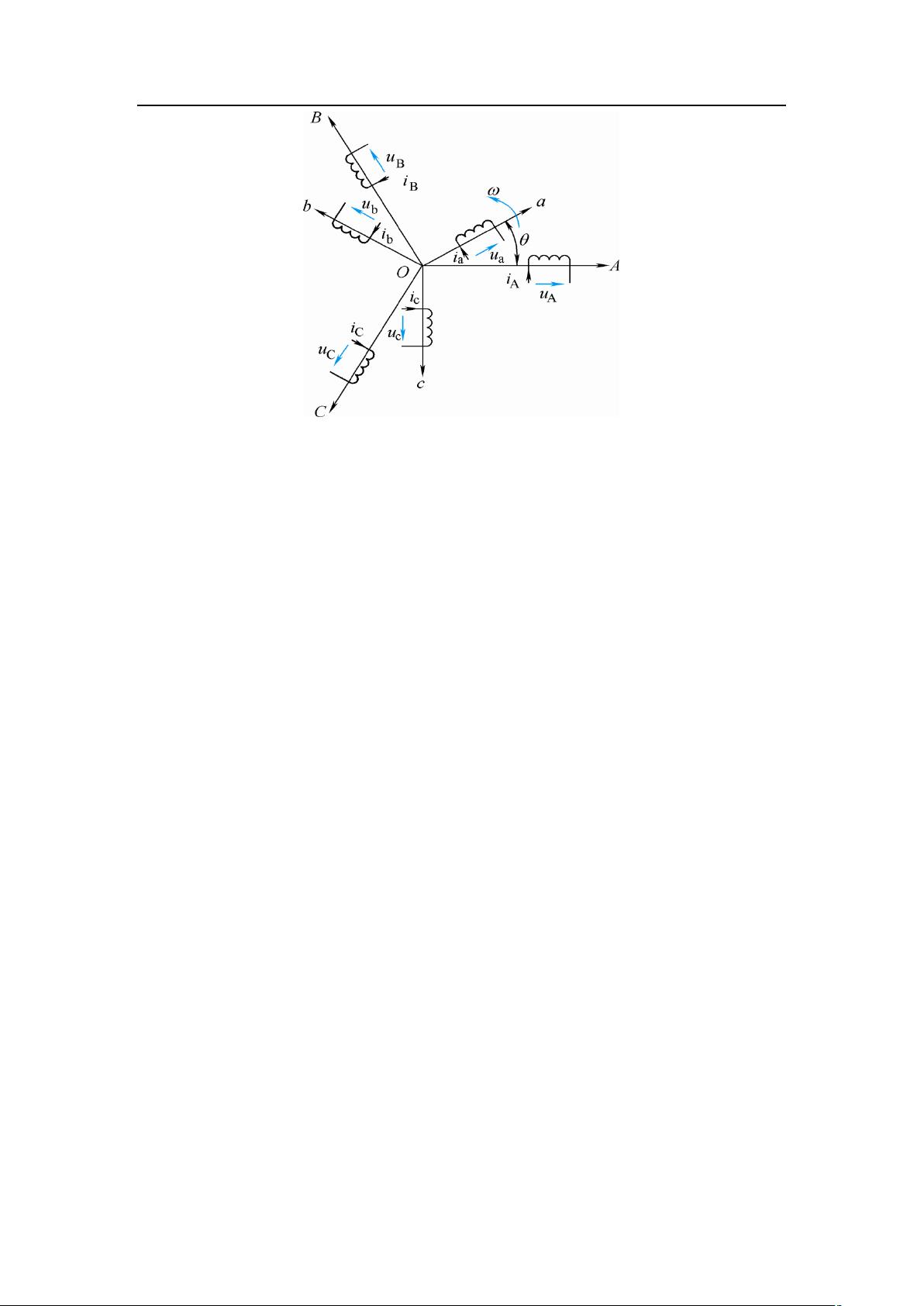
2.1 异步电机的三相动态数学模型........................................................................................1
2.2 异步电机的坐标变换........................................................................................................6
2.2.1 三相-两相变换 ........................................................................................................6
2.2.2 静止两相-旋转正交变换 .........................................................................................7
3 异步电动机按转子磁链定向的矢量控制系统......................................................8
3.1 按转子磁链定向矢量控制的基本思想............................................................................8
3.2 以�-is-�r 为状态变量的状态方程...............................................................................8
3.2.1 dq 坐标系中的状态方程..........................................................................................8
3.2.2 mt 坐标系中的状态方程 .......................................................................................10
3.3 以�-is-�r 为状态变量的 mt 坐标系上的异步电动机动态结构图...........................12
3.4 转速闭环后的矢量控制原理框图..................................................................................12
3.5 转速闭环后的矢量控制系统结构图..............................................................................13
4 异步电动机矢量控制系统仿真............................................................................14
4.1 仿真模型的参数计算......................................................................................................14
4.2 矢量控制系统的仿真模型..............................................................................................15
4.3 仿真结果分析...................................................................................................................17
4.3.1 mt 坐标系中的电流曲线 ....................................................................................17
4.3.2 转速和转子磁链曲线..........................................................................................18
5. 总结与体会.............................................................................................................19
参考文献......................................................................................................................20

剩余20页未读,继续阅读
资源评论













