

武汉理工大学《电力拖动与控制系统》课程设计说明书
1
异步电机矢量控制 Matlab 仿真实
验
1 异步电机动态模型推导
1.1 异步电机动态数学模型的性质
电磁耦合是机电能量转换的必要条件,电流与磁通的乘积产生转矩,转速与
磁通的乘积得到感应电动势。无论是直流电动机,还是交流电动机均如此。交、
直流电动机结构和工作原理的不同,至使表达式差异很大。
异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
(1)变压变频调速时需要进行电压(或电流)和频率的协调控制,有电压(或
电流)和频率两种独立的输入变量。在输出变量中,除转速外,磁通也是一个输
出变量。因此异步电机是一个多变量(多输入多输出)系统。
(2)异步电动机无法单独对磁通进行控制,电流乘磁通产生转矩,转速乘磁
通产生感应电动势,在数学模型中含有两个变量的乘积项。因此即使不考虑磁路
不饱和等因素,数学模型也是非线性的。
(3)三相异步电动机三相绕组存在交叉耦合,每个绕组都有各自的电磁惯性,
再考虑运动系统的机电惯性,转速与转角的积分关系等,动态模型是一个高阶系
统。
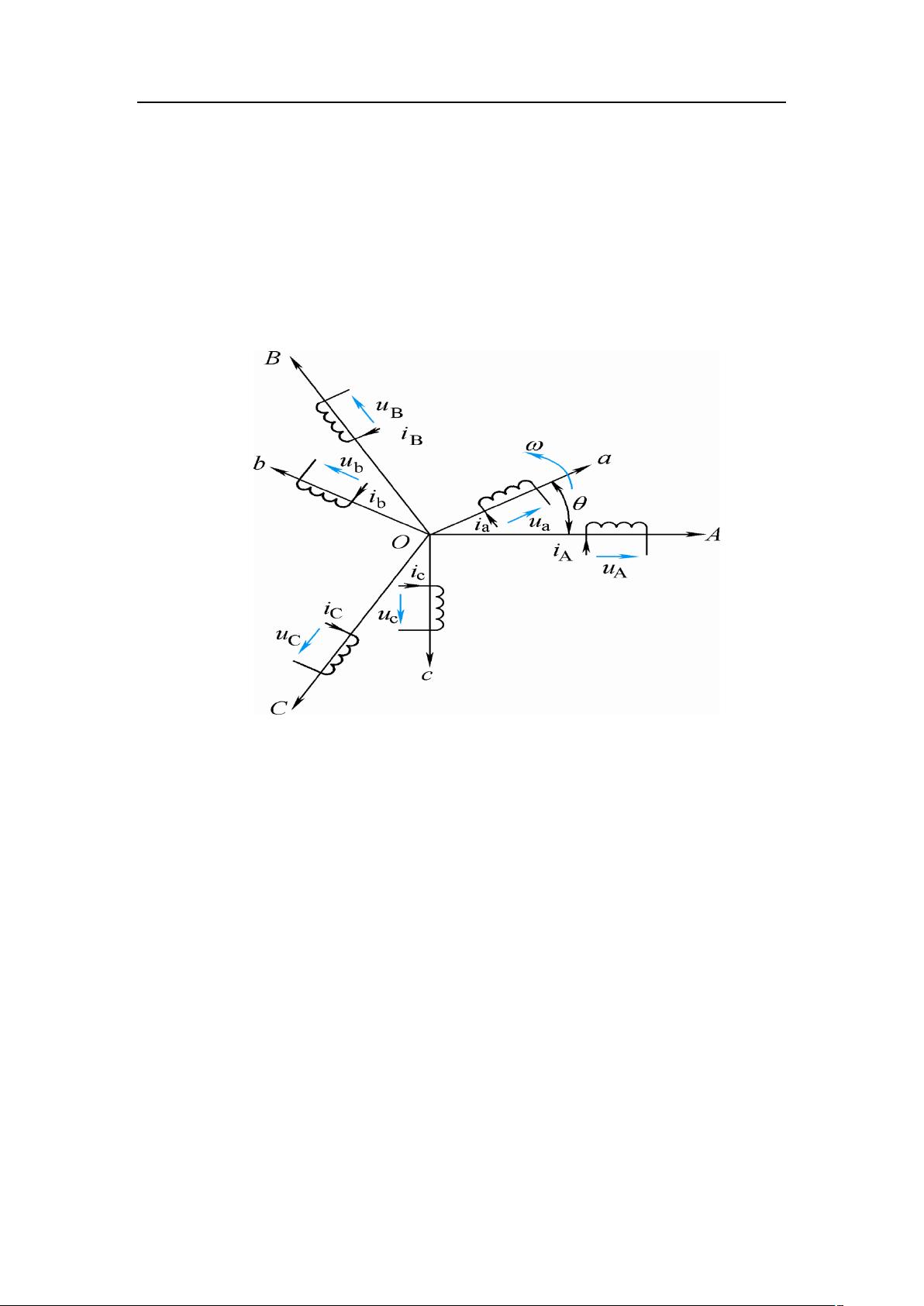
1.2 异步电动机的三相数学模型
1.2.1 异步电机三相数学模型的前提假设
在研究异步电机数学模型时,作如下的假设
(1)忽略空间谐波,三相绕组对称,产生的磁动势沿气隙按正弦规律分布。
(2)忽略磁路饱和,各绕组的自感和互感都是恒定的。
(3)忽略铁心损耗。
(4)不考虑频率变化和温度变化对绕组电阻的影响。


剩余20页未读,继续阅读
资源评论


老帽爬新坡
- 粉丝: 97
- 资源: 2万+









最新资源
- 基于Spring Boot + Vue 3.2 + Vite 4.3开发的前后端分离博客项目源代码.zip
- Go语言基础知识到高级应用全面解析
- 毕业设计前后端分离博客项目源代码.zip
- E008 库洛米(3页).zip
- 前端拿到的列表数据里id都一样的处理办法.txt
- 批量导出多项目核心目录工具
- 课程设计前后端分离博客项目源代码.zip
- C#语言教程:面向对象与高级编程技术全面指南
- PHP语言详细教程:从基础到实战
- 电影管理系统,数据库系统概论大作业
- Web开发中JavaScript编程语言的全面解析
- ajax发请求示例.txt
- 企业数据管理系统项目源代码.zip
- 计算机技术-JAVA语言介绍-基本语法(上)
- 基于西门子 PLC 的晶圆研磨机自动控制系统设计与实现-论文
- 家庭理财系统源代码+答辩PPT+论文.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


