工业机器人现场编程实训任务主要涉及的是如何通过机器人来引导并测量工件的坐标系,这一过程对于自动化生产线上的精准定位和操作至关重要。以下是对这一实训任务的详细解析:
学习目标是掌握由机器人引导的工件测量的实践操作。在进行实际操作前,学员需要做好充分的知识准备,理解与测量相关的理论知识,例如机器人坐标系统、工具坐标变换、工件坐标定义等,并结合实际操作,以便顺利完成实训任务。
任务描述中提到了具体的工件和工具信息。活动工件编号为“13”,命名为“huxingban1”,使用的固定工具编号为“12”,名称为“jianchutou3”。固定工具和工件的准确识别和配置是确保测量精度的基础。
实际操作步骤如下:
1. 进入机器人控制系统的主菜单,选择“投入运行”、“测量”功能,接着选择“固定工具”、“工件”以及“直接测量”,这样就进入了测量模式。
2. 在待测工件编辑页面,设定工件编号和名称,此处应输入“13”和“huxingban1”,点击“继续”。
3. 输入固定工具编号“12”,选择已知工具“jianchutou3”,系统会显示其数据,确认无误后点击“继续”。
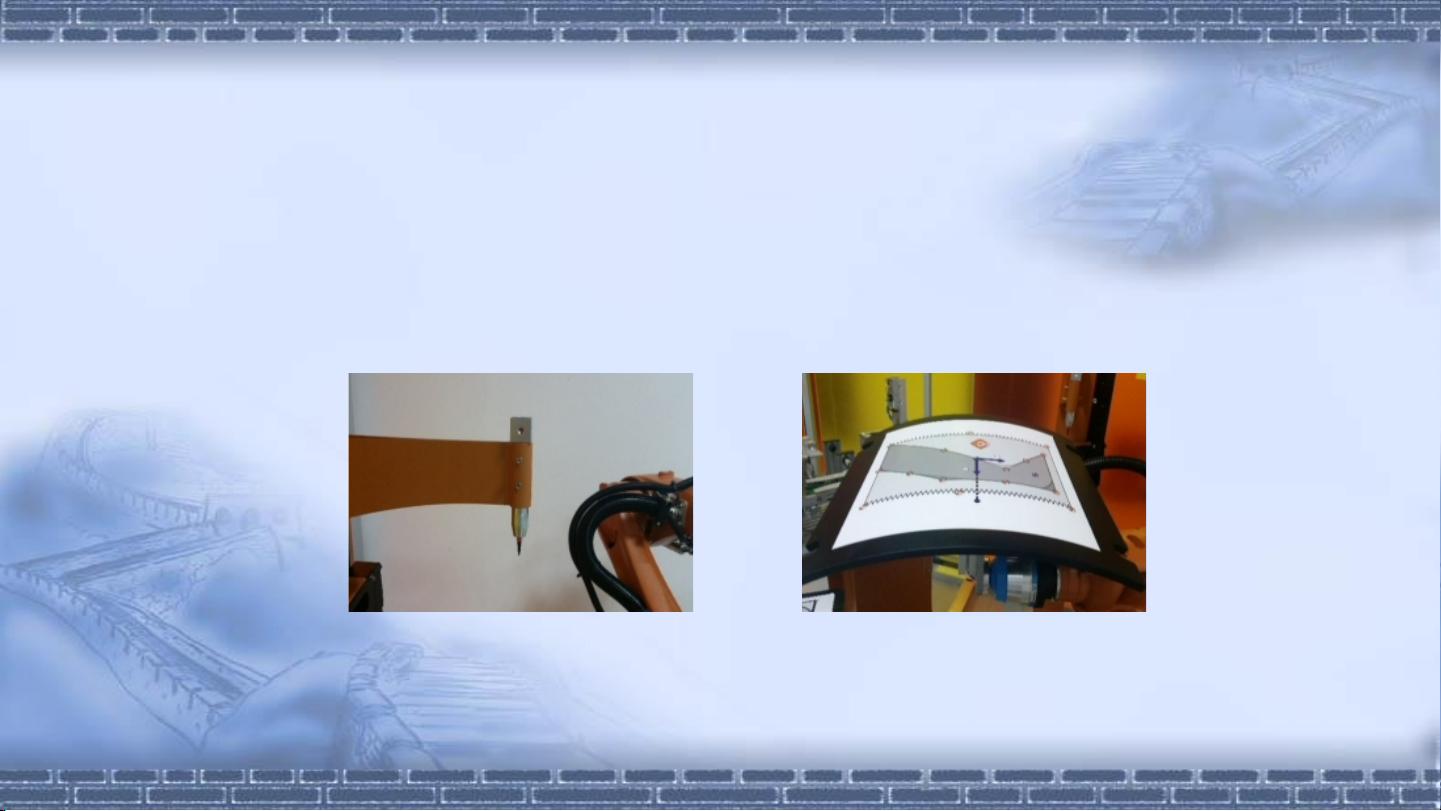
4. 接下来,按照系统提示,操作机器人将活动工件移动到固定工具下方,使TCP(Tool Center Point,工具中心点)对准工件的原点位置。
5. 确认TCP对准工件原点后,点击“测量”并确认继续。
6. 随后,系统要求将工件坐标系的X轴正向上的一个点移至TCP,操作机器人完成此步骤后再次测量并确认。
7. 再次根据提示,将工件XY平面上Y值为正的一点移至TCP,测量并确认。
8. 输入负载数据,包括工件的质量、重心位置、姿态和转动惯量,这些数据对于计算工件坐标系至关重要。
9. 完成所有测量和数据输入后,点击“保存”,系统将采用这些数据建立工件的坐标系。
通过以上步骤,可以得到准确的工件坐标系数据,这对于后续机器人进行工件抓取、搬运或加工等操作时的定位是极其关键的。在实际生产环境中,这样的测量流程能够保证机器人动作的精确性,提高生产效率,减少误差。因此,掌握这一实训任务对于从事工业机器人编程和操作的人员来说是必不可少的技能。







评论0
最新资源