
Adams 与 Matlab 联合仿真例子
作者寄语:这个文件是基于李增刚《adams 入门详解与实例》一书中,Adams
与 Matlab 联合仿真的例子,以及一个名为《2013 版 ADAMS 与 Matlab 联合仿真
(绝对正确版)》的 pdf 文件上修改来,为了方便起见,用了一些复制、粘贴,
所以中间的一些过程会和这两个文件有所重合,不要惊讶,也不要吐槽。做这个
例子的目的,是站在一个普通学习者的角度,介绍联合仿真,和众多学习 adams
的人共勉。我的结论是:以上两个例子中的结果并不矛盾,都是正确的,基本上
看了我的例子后,他们的也就懂了。
李增刚 第 236 页开始。
《2013 版 ADAMS 与 Matlab 联合仿真(绝对正确版)》
1、知识储备
以上两个例子都用到了 PID 控制(比例(proportion)、积分(integral)、微分
(derivative)控制器)
比例就是对误差乘以一个系数
积分就是对误差积分然后再乘以一个系数
微分是对误差求导
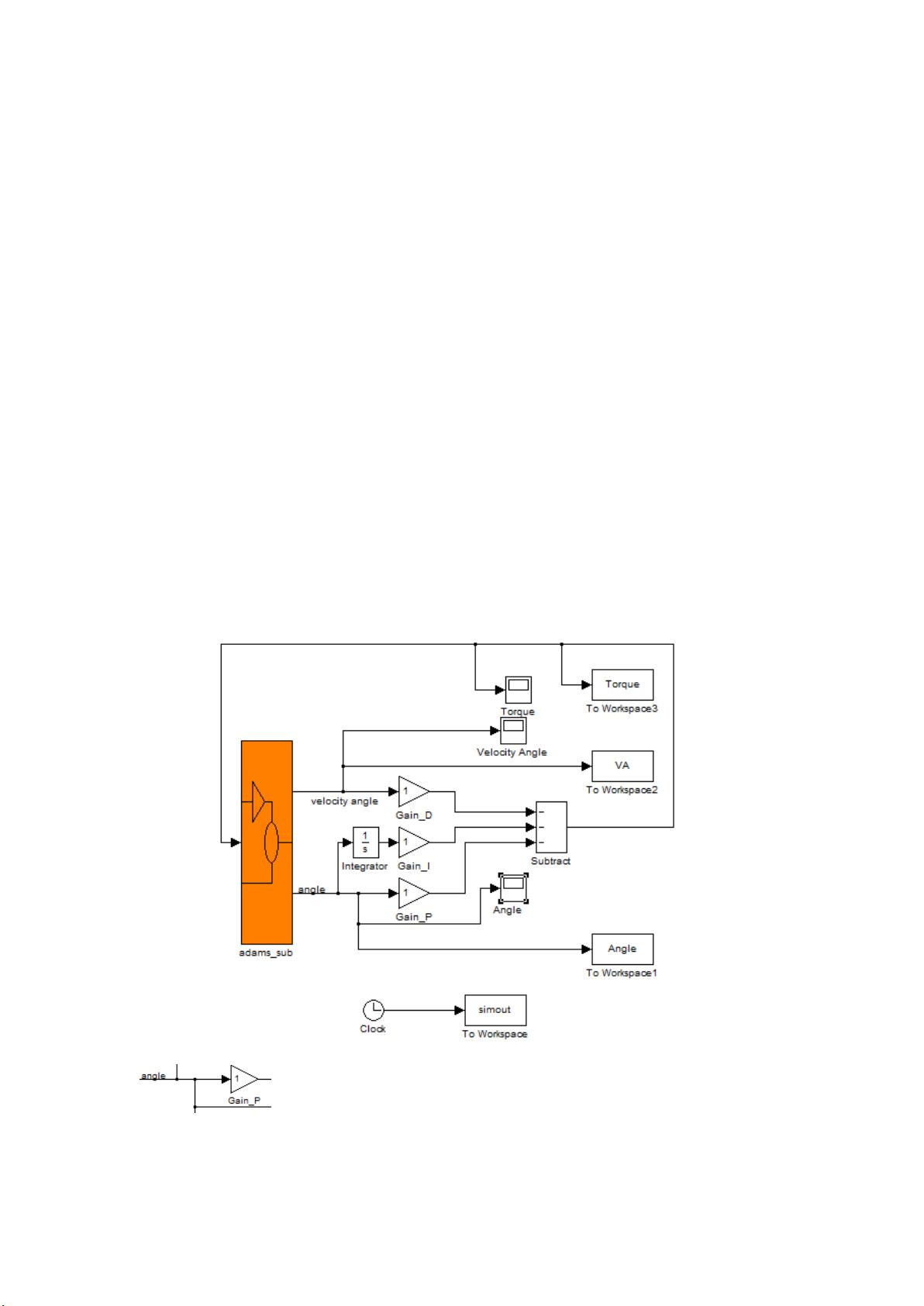
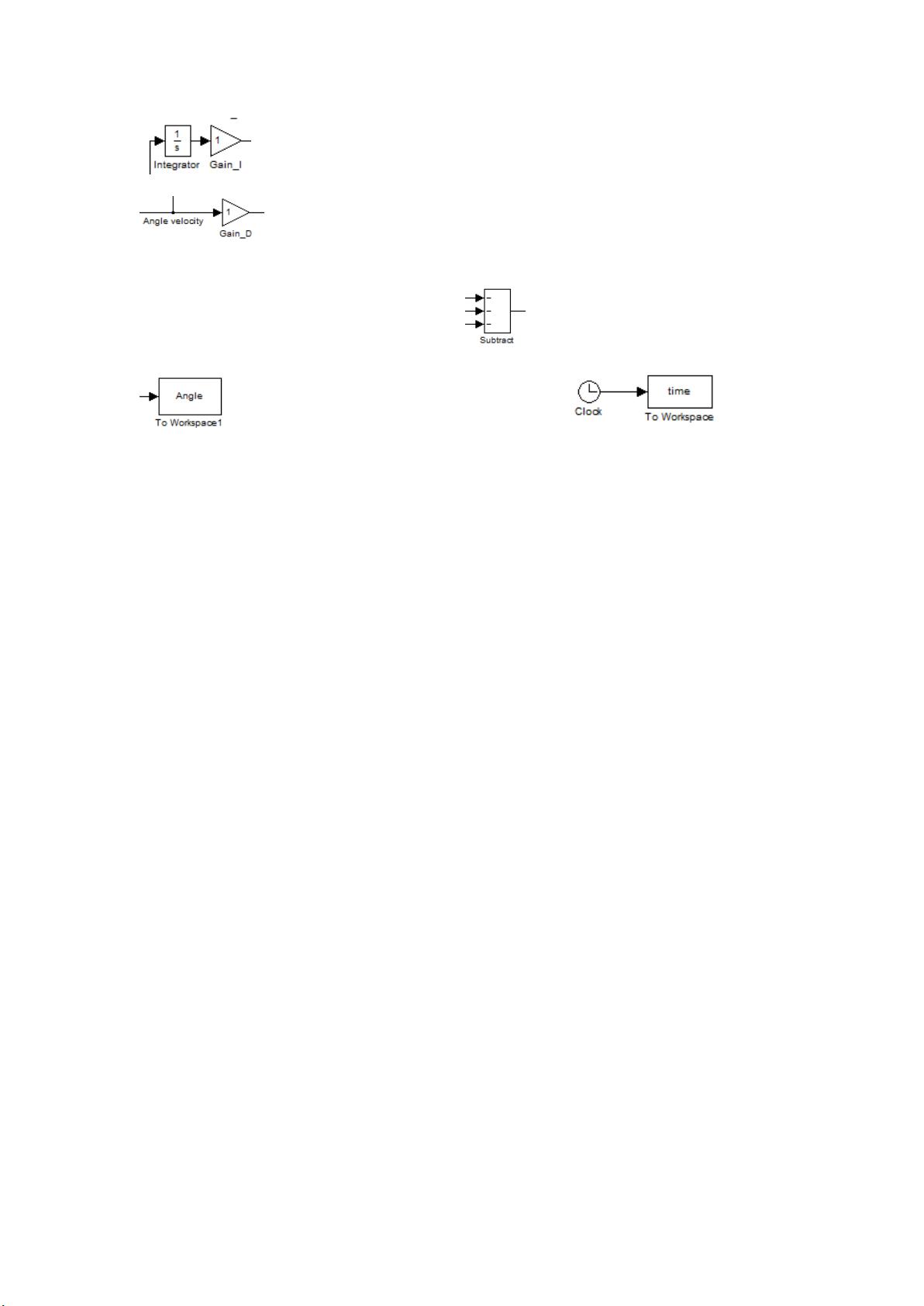
注意我的模型,上面是角速度 Angle velocity,下面是角度 angle,这里的积分是
对 angle 进行积分,导致上面两个例子的不同也就在这,这个地方尤其要注意,
不要上下搞反了。
表示的是对 angle 乘以一个系数,这里选了 1,为比例调节,即 P 调节。
剩余12页未读,继续阅读
资源评论


yyyyyyhhh222
- 粉丝: 452
- 资源: 6万+









最新资源
- 美宝莲郑州国贸360店图纸增加灯片完稿.rar
- 基于C++实现的Hough Forests算法用于人体动作识别检测(提供了可视化功能).zip
- this is a GPU word
- 成都金楠天街活动包店.rar
- 【cocos creator】下拉框
- 基于pytorch实现3D ResNet网络的视频动作分类项目源码+运行说明+模型(支持得分模式和特征模式).zip
- 360国贸纽约城市&女神像.rar
- 更新城市蔓延指数数据集(1990-2023年).xlsx
- 动作识别基于PyTorch的3D ResNets模型实现的动作识别任务+运行说明(含训练、微调和测试、在UCF-101和HMDB-51等多数据集训练).zip
- datafor3dgs
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


