




Robomaster 机器人实验课
实验指导书
指导教师: 罗淑芹

1
实验一:创意组件装配实验
一. 实验目的:
1. 熟悉基本的机械零件,包括:连杆类零件、平板类零件、框架类零件、辅助类零件等;
2. 掌握刚体结构的固定连接、铰接结构的连接、空间结构的组装、平面连杆结构的搭建、整机结构的
组装方法;
3. 充分理解结构的组装方法和组装技巧。
二. 实验内容:
1. 进行简单机构组装:零件的固定、零件的铰接以及四边形结构的组装;
2. 使用三维文件进行楼梯结构的组装。
三. 实验重点:
1. 掌握零件的固定、铰接的组装方法;
2. 掌握利用三维文件辅助安装机械结构的方法。
四. 实验原理:
1. 机械创新组件
(1)零件孔
零件孔提供了“点”单位。最常用的零件孔是“3mm 孔”和“4mm 孔”,通过紧固件(螺丝、螺母等)
可以将零件组装在一起。
(2)连杆类零件
连杆类零件提供了“线”单位。连杆类零件可用于组成平面连杆机构或空间连杆机构。杆与杆相连可
以组成更长的杆,或构成桁架。
(3)平板类零件
这类零件适合做为“面”单位参与组装,例如底板、立板、背板、基座、台面、盘面等。同时平板与
平板之间的连接可以组成更大的“面”,或者不同层次的“面”。
(4)框架类零件
框架类零件的参与,使线和面可以连接成“体”。框架类零件多用于转接,连接不同的“面”零件和“线
零件”,组成框架、外壳等。框架零件本身是钣金折弯件,有一定的立体特性,甚至可以独立成“体”。
(5)辅助类零件
a. 常规传动零件:以齿轮为代表,提供常见的传动机构的元件,它们基本没有通用性,但是某些特殊
机构必须用到。
b. 电机相关零件:电机周边的辅助零件包括电机支架、输出头和 U 型支架等。
c. 轮胎相关零件:轮胎需要联轴器才能和电机的输出头相连。
d. 标准5金件:如螺丝、螺母等用于连接的零件,均为标准五金零件。
2. 零件的连接
(1)刚体结构连接:组装的一些连接点固定的造型,如平面、组合型平面、平台、组合型平台、框架、
外壳造型等。最基础的刚体组装至少需要 2 颗螺丝。这对应了“经过两点有一条直线,并且只有一条直线”
的几何定理。刚体连接一般利用 3mm 零件孔。
图 1 刚体结构连接

2
(2)可动结构连接:可动结构,相对刚体而言,指带有铰接的结构,如轴、连杆组、滑块、不带电机
的传动构造等。最基础的可动模型是铰链结构,利用 4mm 零件孔,并利用轴套起到轴承的作用,使铰链可
以转动。铰接是指连接在一起的零件不能移动,但可以转动,铰接的长杆型零件只有一个连接点。日常所
见如折叠刀、圆规、折尺、以及从动轮等。
图 2 可动结构连接
3. 整机安装方法
如何组装一个整机结构
a. 首先观察一个二轮驱动小车模型的图片
图 3
b. 将一个二轮驱动的小车拆分不同的模块:
图 4
c. 根据以上拆分,所以组装一个二轮小车,将做以下步骤:
二轮小车模型目测拆分为:两个驱动轮模块+底板+ 万向轮部分,分别组装各个模块---整合模块---完成。
应用:整机---目测分解为模块---分别组装各个模块---整合模块---完成。
4. 使用三维文件辅助安装
STP 文件是 CAD 三维设计中比较常用的格式,是一种通用的 3D 文件格式。STP Viewer 是一款小体量的、
针对 STP 格式文件的看图软件,能够显示从许多不同的角度的 3D 图形特征,用户界面非常干净和直观,其
主窗口允许加载想要显示的文件内容,非常便捷,可以帮助用户查看、编辑 STP 格式 3D 文件,方便参照 3D
图组装。
打开文件后,首先看到的是 3D 线框图,大部分时候,我们只需要使用 Dynamic Panning(动态规划,
简单说就是平移)、Shade(塑形,简单说就是填充)、Color(着色)等功能,而“旋转”和“缩放”功能
用鼠标就可以实现。
使用方法:
1) 打开 STP Viewer 软件;
2) 点击 file 出现下拉菜单,点击 open 即可快速的打开需要浏览的图像;
3) 导入图像后即可对导入的图像信息进行快速的查看;
3
4) 树视图窗口显示或隐藏更大的工作区;
5) Shade 和 Wireframe 切换选中对象的显示形式;
6) 使用鼠标可以进行放大或缩小的设置;
7) 使用动态旋转工具,按住鼠标按钮进行平移;
8) Color 改变颜色和颜色的线框,从树中选择的视图对象,单击按钮 Color 颜色选择器对话框会弹出。选
中颜色后,单击确定按钮,选中的对象将按选择的颜色进行阴影。
5. 组装工具的使用
(1)内角扳手:用内六角扳手插入凹进去的六边形旋动。
(2)双开口扳手:先将开口扳手套住螺栓或螺母六角的两个对向面,确保扳手与螺栓完全配合后才能
施力。施力时,一只手推住开口扳手与螺栓连接处,并确保扳手与螺栓完全配合后,另一只手大拇指抵住
扳头,另外四指握紧扳手柄部往身边拉扳。当螺栓、螺母被扳转到极限位置后,将扳手取出并重复前面的
过程。本实验中双开口扳手与内角扳手可配合使用。
(3)十字螺丝刀:将螺丝刀拥有特化形状的端头对准螺丝的顶部凹坑,固定,然后开始旋转手柄。
(4)镊子:可用来夹持零件和元器件管脚,也可以帮助加工元器件引脚,做简单的成形工作。用大拇
指和食指夹住镊子,使镊子后柄位于掌心。
五. 实验步骤:
1. 零件的固定:固定连接的零件紧紧连在一起,不能移动,也不能转动。
学生完成以下三种形式的连接:
图 5 零件的固定连接
2. 零件的铰接:4mm 孔加入轴套可以实现铰接功能。
学生完成以下三种铰接
图 6 零件的铰接连接
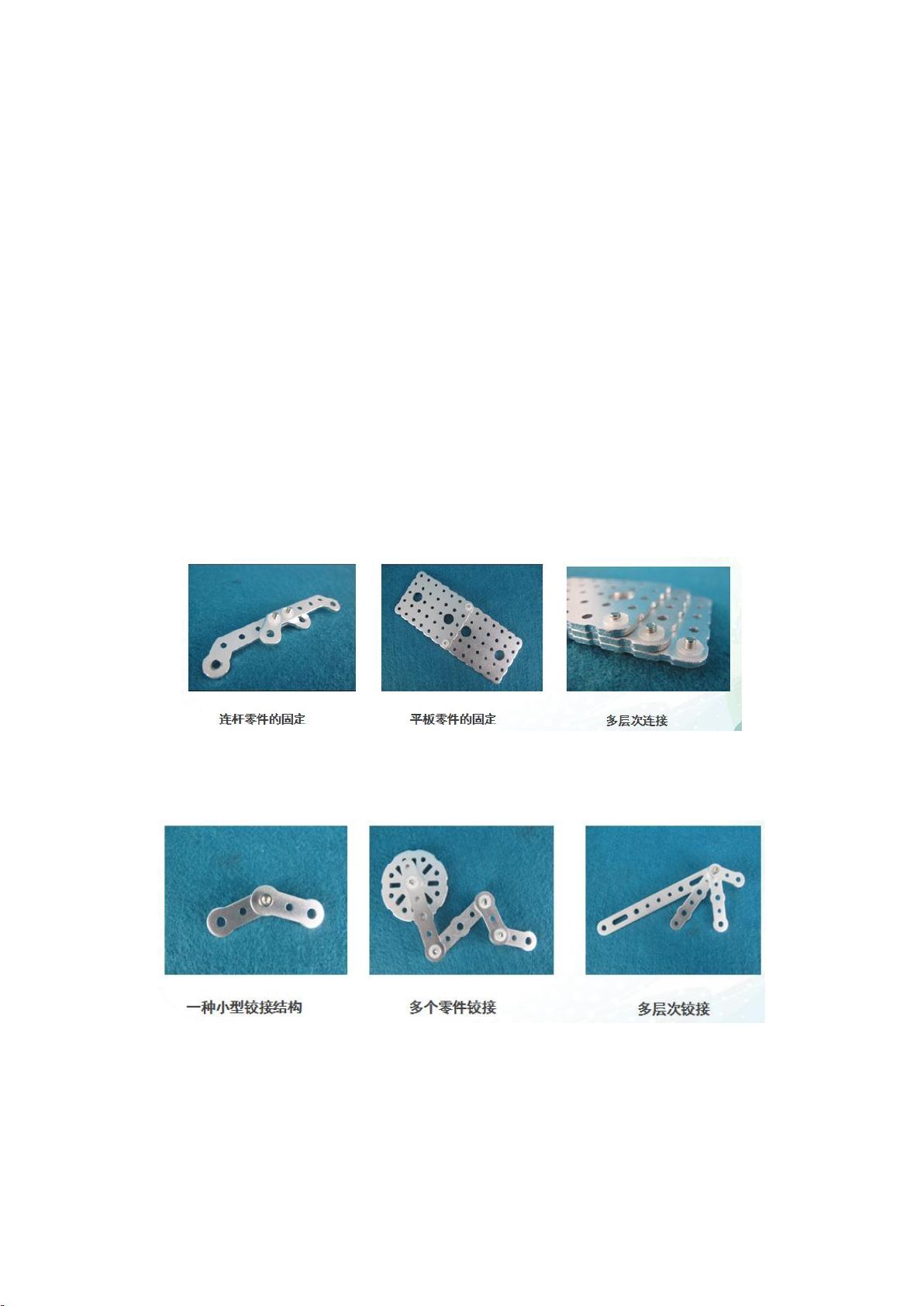
3. 组装四边形结构
4
图 7 平行四边形结构
所需器材:从设备中找到以下零件:机械手 40mm×2、机械手 40mm 驱动 X2、螺丝×4、螺母×4、轴套×
4
组装中注意事项:
a.在连接的过程中一定要记得加轴套(根据口径的大小选择轴套的长短),从而起到转动的作用。
b.在连成四边形的过程中一定要注意层次结构。
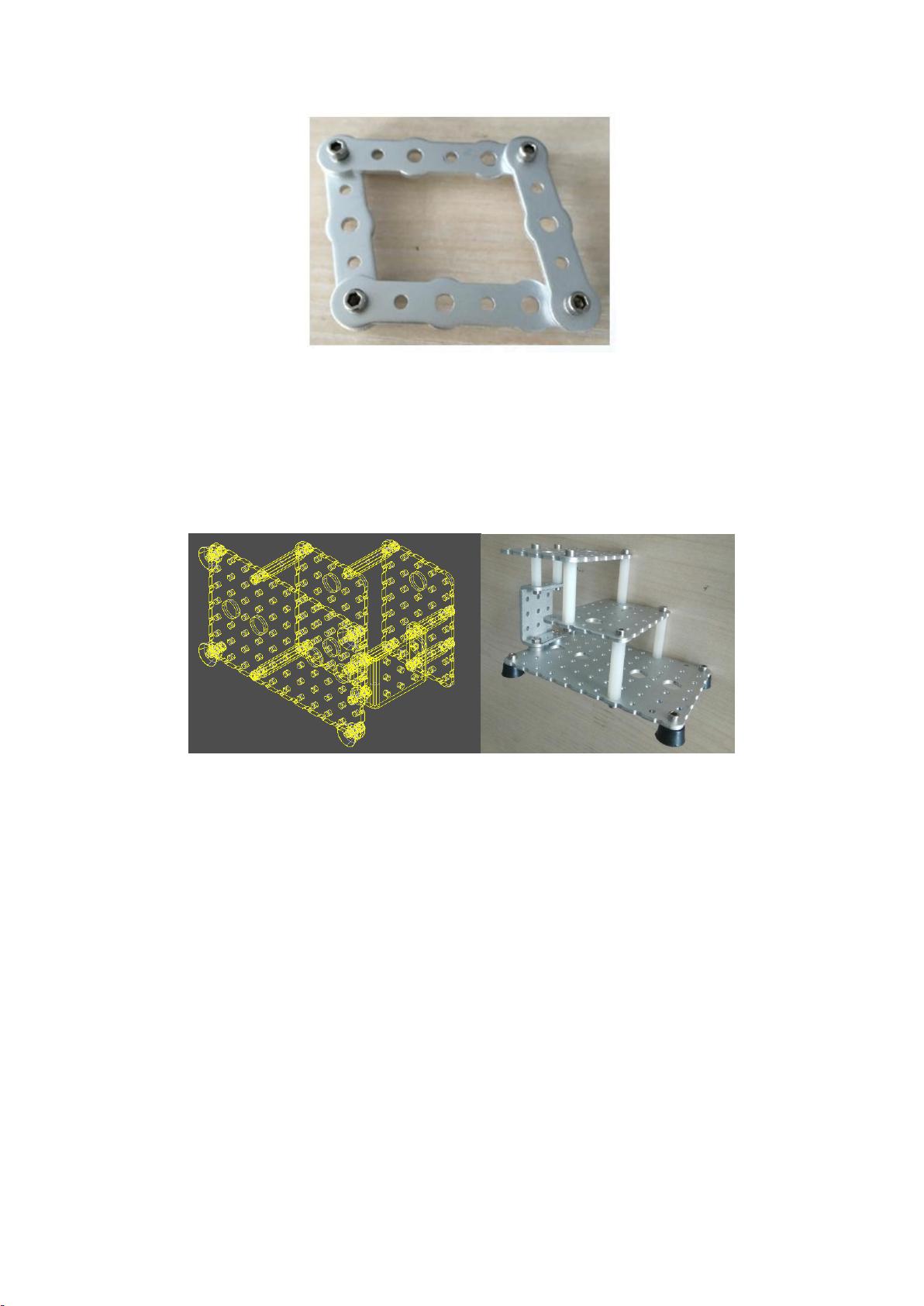
4. 使用三维文件进行楼梯结构的组装
图 8 楼梯结构
所需器材:请从设备中找出以下零件:5X7 孔平板×2、7X11 孔平板×1、3X5 折弯×1、螺柱 20×2、螺柱
30×4、螺丝(F306 或 F308,即最短的和第二短的)、垫片 10×2、橡胶垫×4、组装工具。
思考题:
固定连接与铰接的组装方式有什么不同。
辅助类零件都有哪些,分别有什么作用。
STP Viewer 软件的特点及常用功能有哪些。













