




1
《电机学》仿真大作业
仿真案例名称
三相异步电动机反接制动的
MATLAB/Simulink 仿真
成 绩
2
一、仿真案例:
反接制动是指,为了快速停机,可以将运行着的电机与电源相连的三根电源
线中的任意两根对调,从而使电机产生的旋转磁场方向改变,进而使得电机的电
磁转矩方向随之发生改变。这样,作用在转子上的电磁转矩与电机转子转动的方
向相反,成为制动转矩,起到了制动作用。
本次仿真利用 MATLAB 软件中的动态仿真工具 SIMULINK,构造了三相异步电
动机电源反接制动的仿真模型,通过观察发电机电压、电流、转速、电磁转矩,
定子磁链等,对仿真结果进行分析,得出结论。并对所建模型、所采用分析解
决问题的方法等方面存在的局限性进行说明。
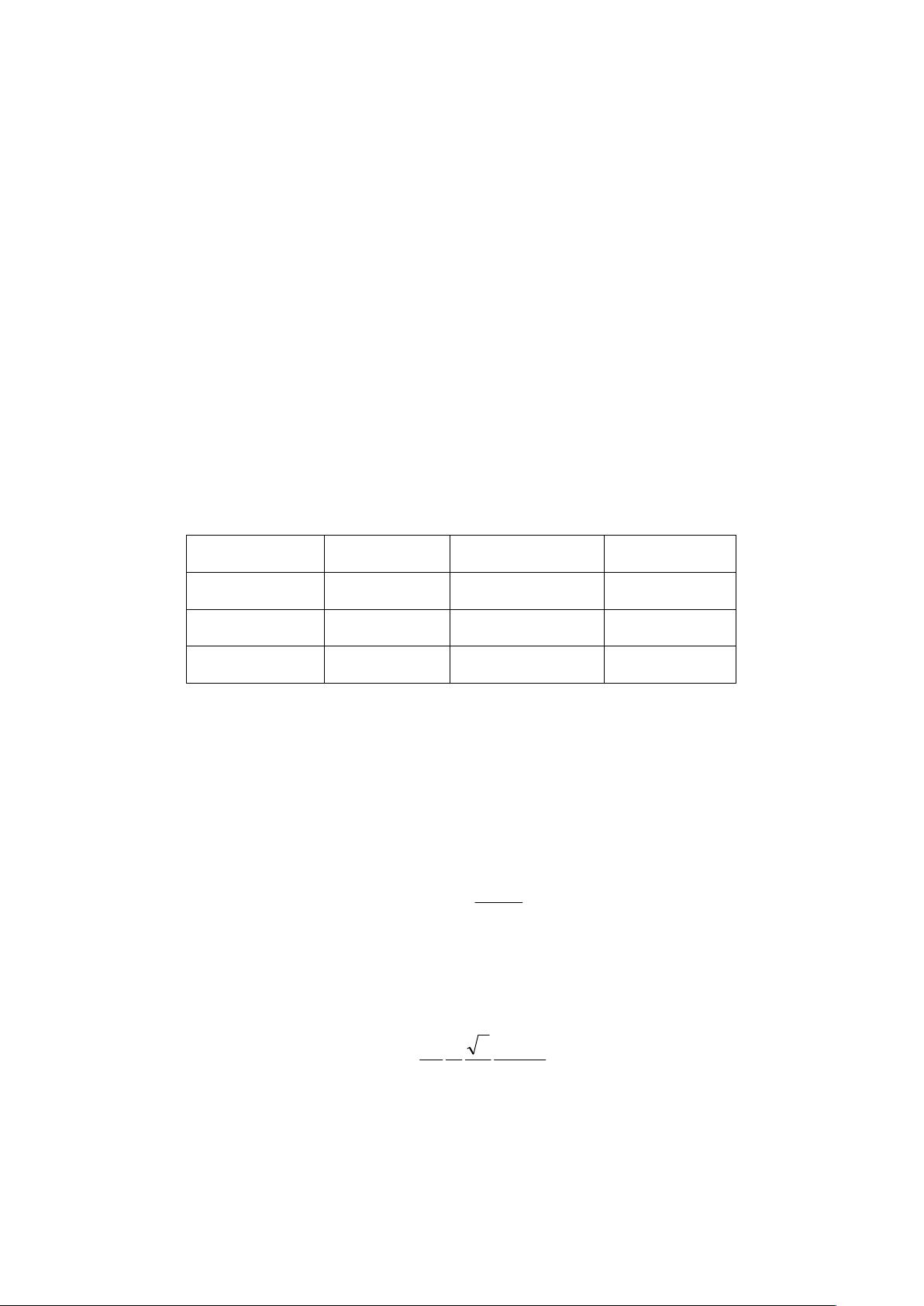
三相异步电动机为 18.45kW /380V,额定频率 50Hz 的变频电机,其参数来源
于 MATLAB 中异步电动仿真模块的默认预设参数。具体参数见下表 1:
图 1 异步电动机参数
Rs (Ω)
L1s (H)
Rr’ (Ω)
L1r’ (H)
0.5968
0.0003495
0.6528
0.005473
Lm (H)
J (kg▪m^2)
F (N▪m▪s)
Pole pairs
0.0354
0.05
0.005879
2
二、三相异步电动机运行原理
三相异步电动机定子三相绕组接在三相对称交流电源上,在电机气隙中产生
以同步转速
1
n
旋转的磁动势
1
F
1
11
1
35.1 I
p
kN
F
dp
�
该磁动势切割转子绕组,使其感应电动势,由于转子绕组自成闭合回路,转
子绕组中就会产生感应电流
2
I
,产生相对定子以转速
1
n
旋转的转子磁动势
2
F
2
22
2
2
2
24
2
I
p
kN
m
F
dp
Π
�
其与定子磁动势
1
F
相互作用,一方面合成气隙中的旋转的励磁磁动势
0
F

3
0
11
0
35.1 I
p
kN
F
dp
�
由
0
F
在电机中产生同时交链定转子绕组的主磁通,所产生的的基波每极磁通量
m
�
与
0
F
之间呈现非线性关系,这是因为主磁路包括转子铁心,转子齿、气隙、
定子齿,定子轭,除气隙外,都由铁磁材料构成,在磁路饱和时,呈现出饱和特
性。主磁通
m
�
会在定子绕组中感应电势
mdp
kNfE
�
1111
44.4�
在转子绕组中感应电势
mdps
kNfE
�
2222
44.4�
另一方面,产生电磁转矩 T
2
2
11
2
2
11
22
)1()[(2
cos
�
�
�
���
��
XX
s
R
Rf
s
R
pUm
ICT
mt
Π
��
带动转子以转速 n 旋转。
p
f
snsn
1
1
60
)1()1( ����
其中
p
为极对数,
1
f
为定子电流、感应电势的频率,
1
N
为定子一相有效串
联匝数,
1dp
k
为定子绕组的基波绕组因数,
1
I
为定子一相电流的有效值,
1
m
、
2
m
为定子、转子相数,
2
f
为转子电流、感应电势的频率,
2
N
为转子一相有效
串联匝数,
2dp
k
为转子绕组的基波绕组因数,
2
I
为转子一相电流的有效值,s
为转差率,
1
R
、
2
R
定子、转子绕组电阻,
1
X
、
2
X
为定子、转子绕组漏电抗。
电动机工作原理为:当电动机的三相定子绕组(各相差 120°的电角度),
通入三相对称交流电后,将产生一个旋转磁场,该旋转磁场切割转子绕组,从而
在转子绕组中产生感应电流(转子绕组是闭合通路),载流的转子导体在定子旋
转磁场作用下将产生电磁力,从而在电机转轴上形成电磁转矩,驱动电动机旋转,
并且电机旋转方向与旋转磁场方向相同。

4
三、反接制动的特点
反接制动是通过改变电动机电源相序, 使定子绕组产生的旋转磁场与转子
惯性旋转的方向相反, 因而产生制动作用。使电动机转速迅速下降,直至停止。
如果当电动机转速
0�n
时仍未把反向电源断开, 则电动机反转。反接制动
控制的任务就是恰到好处地把握
0�n
的瞬间,及时切断反向电源。由于反接制
动时, 定子旋转磁场与转子的相对速度接近于二倍同步转速。所以定子绕组中
流过的反接制动电流相当于电动机全压启动电流的二倍。因电动机作反接制动运
行时,除了容量很小,一般应在定子回路串接限流电阻。制动限流电阻的作用,除
了限流,也起到了减缓制动冲击的作用。
但此时又有了新的问题,即如何实现控制,倘如靠人工来实现
0�n
时切断
制动电源,这样做显然带有很大的局限性,无法准确把控时间节点, 于是人们
对此采用了速度继电器对其进行控制。
备注:速度继电器的工作原理——当电动机旋转时,速度继电器的转子随之
转动,从而在转子和定子之间的气隙中产生旋转磁场,在定子绕组上产生感应电
流,该电流在永久磁铁的旋转磁场作用下,产生电磁转矩,使定子随永久磁铁转
动的方向偏转。偏转角度与电动机的转速成正比。当定子偏转到一定角度时,带
动胶木摆杆推动簧片,使常闭触头断开,常开触头闭合。当电动机转速低于某一
值时,定子产生转矩减小,触头在簧片作用下复位。
一般速度继电器的触头动作转速为 120r/min,触头复位转速在 100r/min 以
下。在连续工作制中,能可靠地工作在 3000~3600r/min。













评论0