






57 / 93
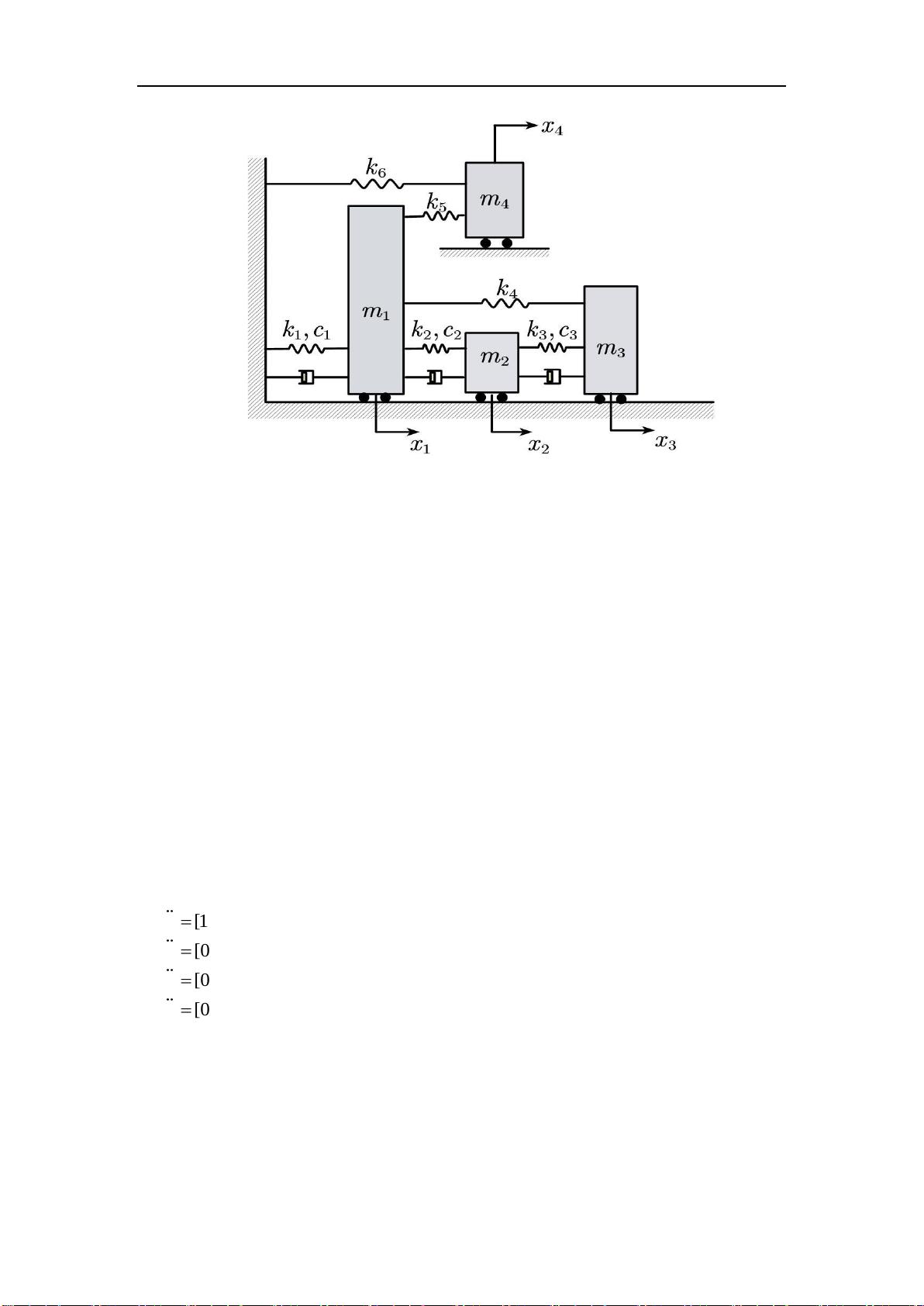
二、MATLAB 动力学分析:四自由度弹阻质系统
(一) 状态空间法
1. 状态空间法概述
经典控制理论中常用到传递函数来描述系统,但仍有一些不足之处:
系统模型为单输入单输出系统
忽略初始条件的影响
不包含系统的所有信息
无法利用系统的内部信息来改变系统的性能
近年来,机械系统的现代趋势是向高度复杂化发展,对于复杂的时变、非线
性、多输入-多输出系统的问题,需要用对系统内部描述的新方法——状态空间
分析法。这是一种对系统的完全描述,不同于传递函数的“黑箱”,状态空间法
能够完全表征系统的所有动力学特征,属于内部描述,实现了各种不同的系统(单
变量、多变量、时变、时不变、线性、 非线性等)描述形式的统一。适合描述复
杂的动态系统。
现代控制理论中的状态空间理论发展迅速,以状态空间法为基础,分析和设
计控制系统。近年来, 状态空间法逐步推广并成功地运用到军事、生物医学、社
会经济及人类生活等诸多领域 , 并且有着广阔的发展前景
[1]
。它的出现,推动了
控制理论的发展,实现了由古典控制理论向现代控制理论的过渡。
了解状态空间法首先需要清楚一些概念:
状态变量
能够完全表征系统动力学特征的一组独立变量成为系统的状态变量,是系统
的内部变量。由状态变量构成的列向量
12
( ) [ ( ), ( ), ( )]
T
n
x t x t x t x t=
称为状态向量。
状态向量的取值空间称为状态空间。
状态模型
如果系统是线性定常的,并且可以用 n 个状态变量,r 个输入变量和 m 个输
出变量描述。设一个 n 维线性控制系统的状态向量为
()xt
,输入向量为
()ut
,输
出向量为
()yt
,状态模型=状态方程+输出方程。
状态方程具有的形式为
1 11 1 12 2 1 11 1 12 2 1
2 21 1 22 2 2 21 1 22 2 2
1 1 2 2 1 1 2 2
n n r r
n n r r
n n n nn n n n nr r
x a x a x a x b u b u b u
x a x a x a x b u b u b u
x a x a x a x b u b u b u
= + + + + + + +
= + + + + + + +
= + + + + + + +
(2.1)
它的输出方程具有的形式为
1 11 1 12 2 1 11 1 12 2 1
2 21 1 22 2 2 21 1 22 2 2
1 1 2 2 1 1 2 2
n n r r
n n r r
n n n nn n n n nr r
y c x c x c x d u d u d u
y c x c x c x d u d u d u
y c x c x c x d u d u d u
= + + + + + + +
= + + + + + + +
= + + + + + + +
(2.2)
式中,系数
ij
a
,
ij
b
,
ij
c
,
ij
d
为常数,其中有一些可能为零














- 1
- 2
- 3
前往页