六自由度焊接机器人设计 (2).pdf
版权申诉
150 浏览量
2022-07-12
02:32:17
上传
评论
收藏 976KB PDF 举报


毕业设计
1 前言
1.1 设计背景与意义
1.1.1 焊接机器人概述
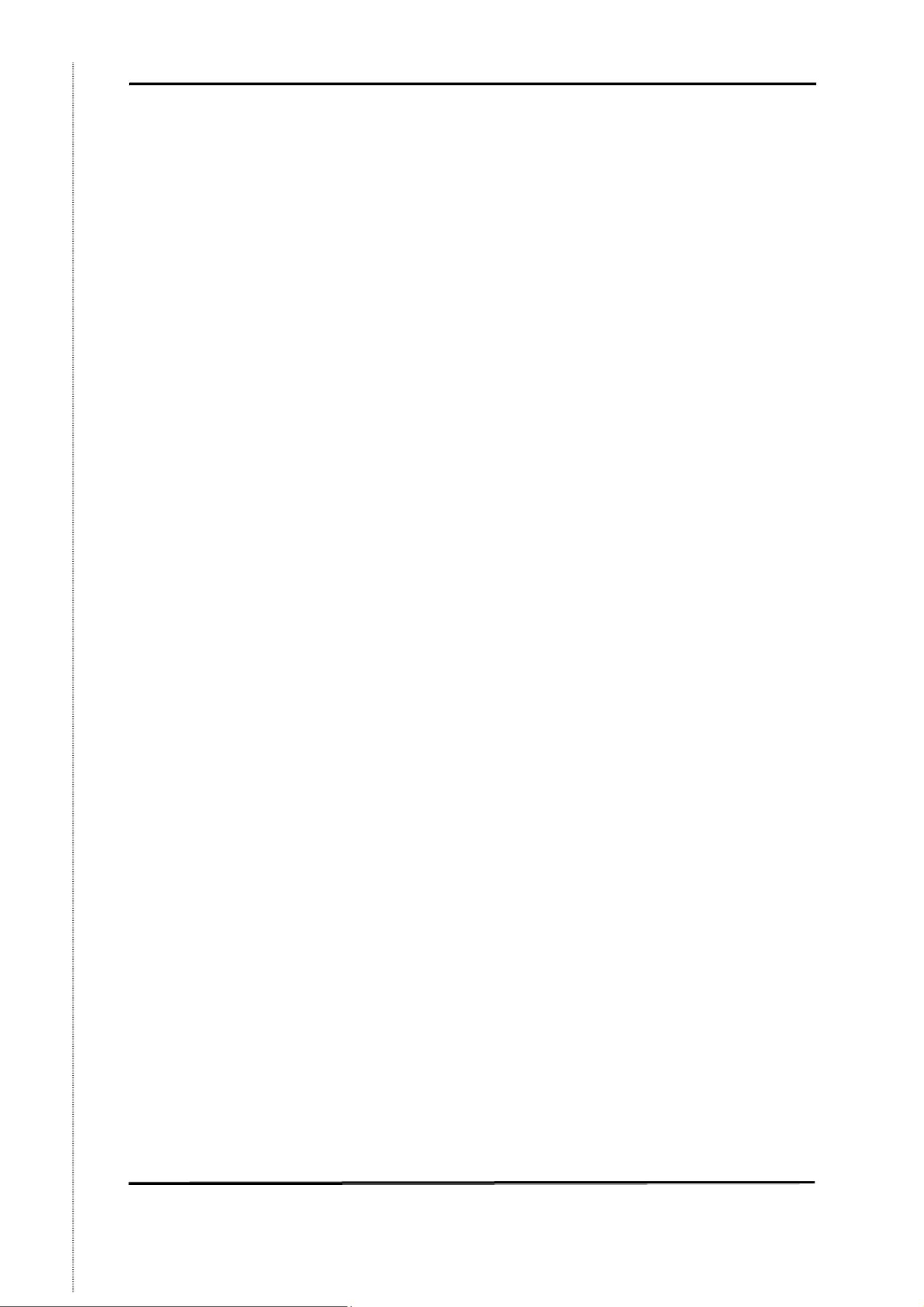
焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。工业机器人是一种多
用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动
化领域。为了适应不同的用途,工业机器人最后一个轴的机械接口,通常是一个连接
法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装
接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
自从世界上第一台工业机器人UNIMATE于1959年在美国诞生以来,机器人的应用
和技术发展经历了三个阶段:示教再现型机器人、具有感知能力的机器人、智能型机
器人。
1.1.2 焊接机器人国内外研究现状
(1)国外研究现状
自从世界上第一台工业机器人UNIMATE于1959年在美国诞生以来,机器人在工业
发达国家得到了迅速发展。其中日本具有机器人王国之称,此外,世界上还有许多工
业发达国家,如美国、前苏联等一些国家的机器人产业也发展得很快。在亚洲,韩国
的机器人产业发展也很迅速,现排名世界前列。
现在国外的机器人各个方面的技术发展现状为,在机械结构上以发展关节型机器
人为主流,在控制系统方面主要是发展基于PC的开放结构的控制系统,在驱动技术方
面主要是发展 AC伺服驱动技术,此外智能化传感器技术的机器人数量呈上升趋势。
焊接机器人技术正朝着高速、高精度、多功能化方向发展。
(2)国内研究现状
我国的工业机器人技术经过三十多年的发展,现在已掌握了机器人的设计制造技
术、控制系统的硬件和软件设计技术、运动学和轨迹规划技术,开发出了弧焊、点焊、
装配等机器人;现阶段我国焊接机器人的应用主要集中在汽车、摩托车、工程机械、
铁路机车等主要行业。其中弧焊机器人已广泛应用于各大汽车制造厂的自动焊装线
上。但从总体上来看,我国的工业机器人技术及其工程上的应用水平和国外相比起来
还有一定的差距。
现阶段我国工业机器人技术主题发展战略目标是:根据2l世纪初,我国国民经济
对先进制造及自动化技术的需求,瞄准国际前沿高新技术发展方向,创新性地进行研
究和开发工业机器人技术领域的基础技术、关键技术,产品技术和系统技术。
- 1 -

剩余17页未读,继续阅读
资源评论


春哥111
- 粉丝: 1w+
- 资源: 5万+









最新资源
- 使用 C 语言实现的计算非负整数的阶乘
- 2011-2021最新版本北京大学数字普惠金融指数(PKU-DFIIC).xlsx
- 县域数字乡村指数2018-2020(1).xlsx
- Docker容器配置进阶
- tensorflow-gpu-2.7.4-cp37-cp37m-manylinux2010-x86-64.whl
- 多段线、 圆、弧转多段线(仅我可见)
- tensorflow-2.7.2-cp38-cp38-manylinux2010-x86-64.whl
- 李慧琴C语言基础部分.zip
- yeyue-p8Yi4-ve4a83792.apk
- tensorflow-gpu-2.7.3-cp38-cp38-manylinux2010-x86-64.whl
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


