《树莓派与舵机控制:串口与IIC接口详解》
树莓派作为一款微型计算机,因其强大的可扩展性和丰富的硬件支持,在DIY爱好者和教育领域中广受欢迎。在许多项目中,我们常常需要用到舵机来实现精确的机械运动。本资料包“3.pico驱动资料.zip”聚焦于树莓派如何通过串口和IIC接口来控制舵机,以帮助读者深入理解这两个通信协议以及在实际操作中的应用。
我们要了解舵机的基本原理。舵机是一种带有内置位置反馈的电机,通过接收脉宽调制(PWM)信号来改变其旋转角度。在树莓派上,我们可以利用GPIO引脚生成PWM信号,进而控制舵机的角度。
1. **串口控制舵机**:串行通信接口(Serial Peripheral Interface, SPI)是一种全双工、同步的通信协议,常用于连接微控制器和外设。树莓派可以通过SPI接口与舵机控制器通信,从而实现对多个舵机的同步控制。在树莓派上设置SPI需要修改配置文件,并可能需要安装额外的库,如`spidev`。通过编程,我们可以发送特定的PWM信号到舵机控制器,从而控制舵机的角度。
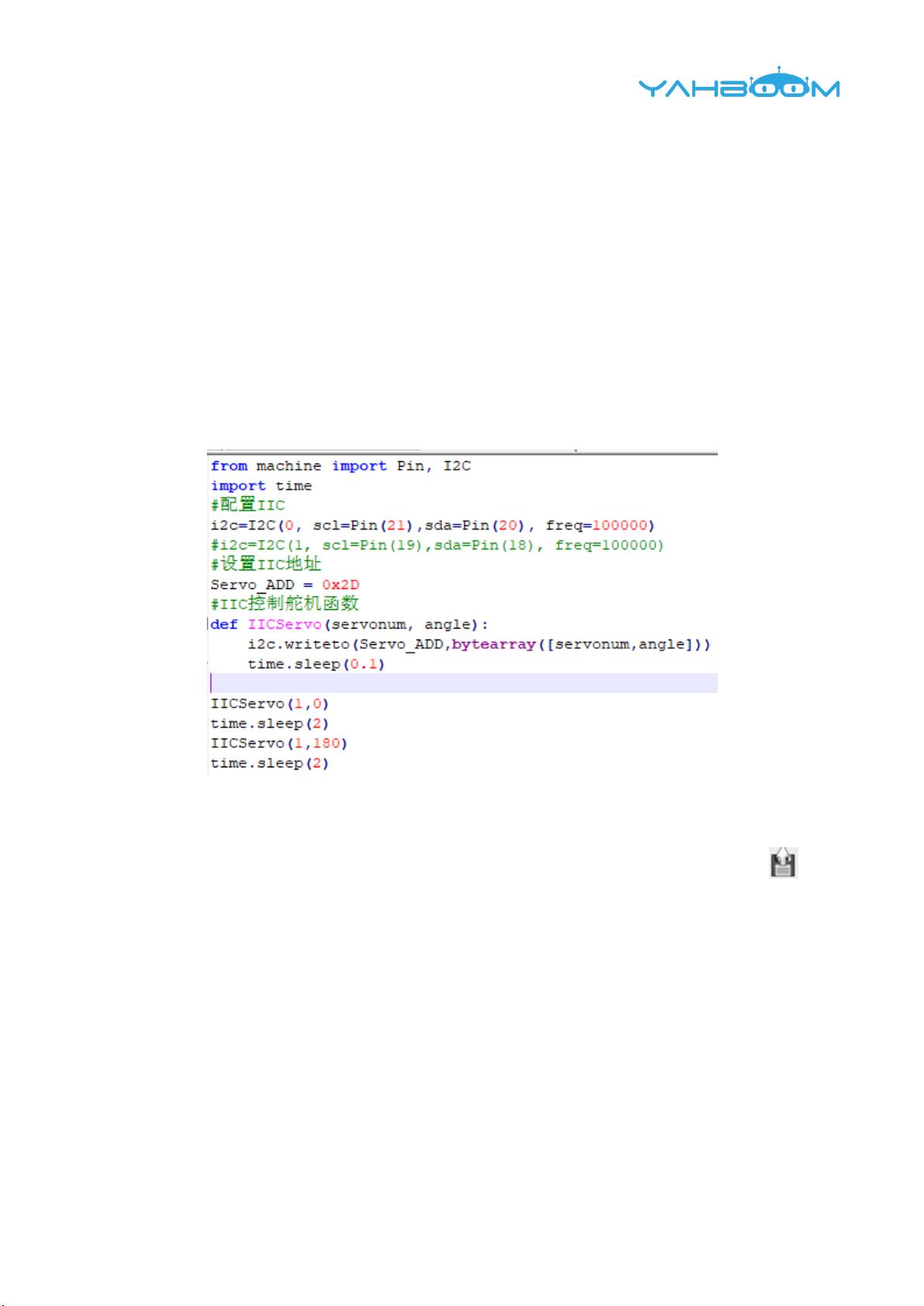
2. **IIC控制舵机**:IIC(Inter-Integrated Circuit),也称为I²C或两线制接口,是一种多主控、串行通信协议,仅需要两根数据线即可实现双向通信。IIC接口常用于连接低功耗、小型电子设备,如舵机控制器。树莓派上的BCM2835/2837 SoC集成了IIC控制器,可以方便地与支持IIC的舵机控制器进行通信。使用Python的`smbus`库可以方便地编写IIC通信程序,控制舵机的角度和速度。
在实际应用中,串口和IIC各有优势。串口适合高速、长距离的数据传输,而IIC则在节省引脚资源和简化布线方面具有优势。选择哪种方式取决于项目需求,例如,如果你需要控制大量舵机且空间有限,IIC可能是更好的选择;如果追求更高的通信速率和更远的传输距离,串口则更合适。
在“3.pico驱动资料.zip”中,包含的文件“串口控制舵机”和“IIC控制舵机”分别提供了这两种通信方式的具体步骤和示例代码。通过学习这些资料,你将能够熟练掌握树莓派控制舵机的方法,进一步提升你的项目开发能力。
树莓派与舵机的结合为各种创意项目提供了无限可能性。无论是机器人、无人机还是模型制作,了解并掌握串口和IIC控制舵机的技能都将是你成功的关键。通过实践和不断探索,你可以充分利用这些知识,创造出属于自己的智能装置。

 3.pico驱动资料.zip (6个子文件)
3.pico驱动资料.zip (6个子文件)  串口控制舵机
串口控制舵机  模块接线图.png 2.66MB
模块接线图.png 2.66MB 16CServo-uart.py 565B
16CServo-uart.py 565B 串口控制舵机.pdf 304KB
串口控制舵机.pdf 304KB












评论0