







雷达数据处理库使用说明
文件清单
fd_radar.dll:数据处理库文件。
parms.xml:数据处理参数文件。
radartypes.csv:雷达型号配置文件。
数据处理库说明
Any CPU(32/64 位)
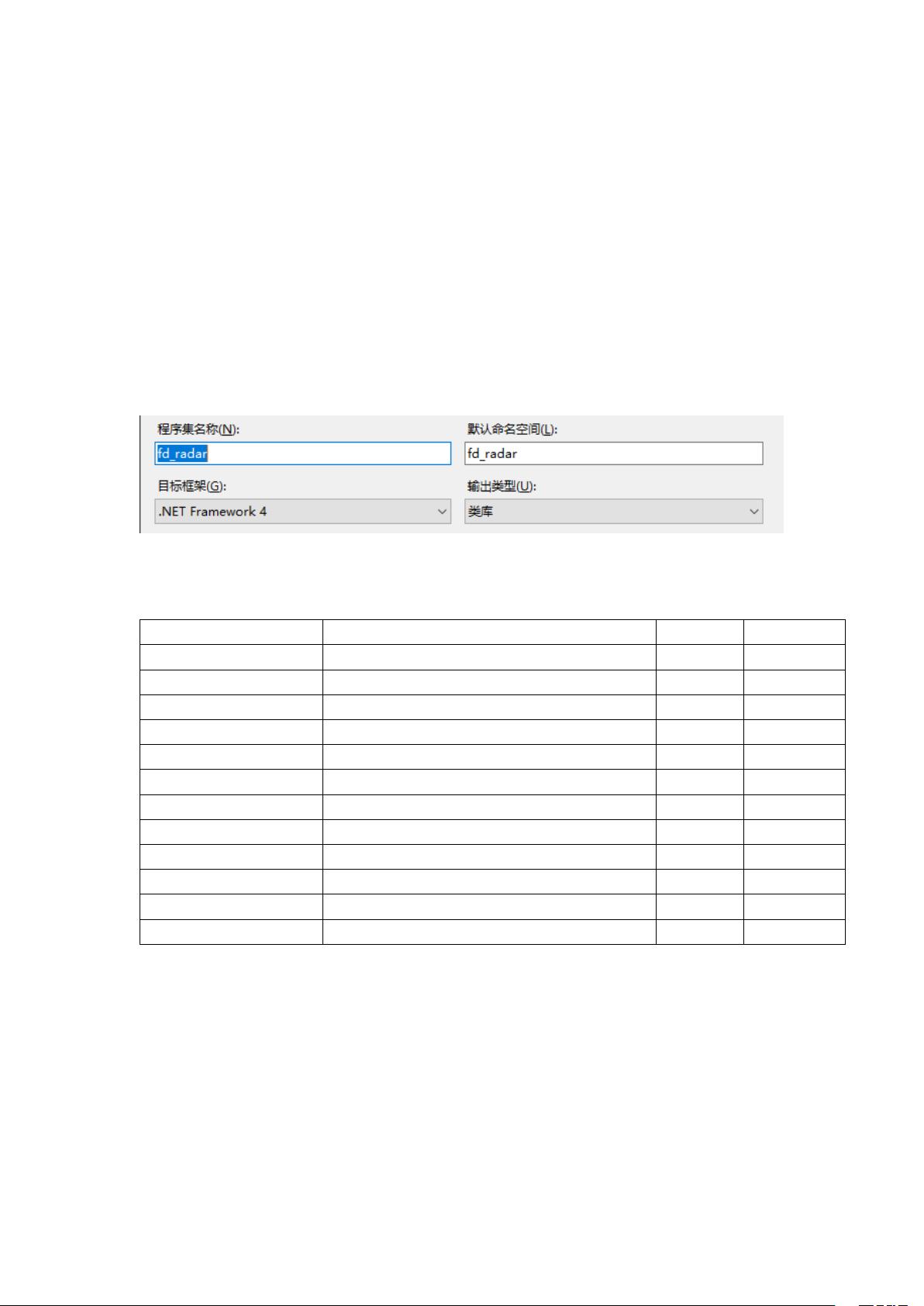
构造接口:
public Trace(string id, string parms),id:雷达 ID,parms:数据处理参数,xml 格式字符串,
可通过读取 parms.xml 获取,具体参数说明如下。
type
型号
FD5
antenna_tilt
天线面仰角(°)
float
默认值:0
alt
安装高度(m),海拔高度、相对高度皆可
float
0
working_radius
工作半径(m)
float
2000
min_speed
速度下限(m/s)
float
0.5
max_speed
速度下限(m/s)
float
32
near_range
距离下限(m)
float
100
far_range
距离上限(m)
float
3000
min_height
高度下限(m)
float
0
max_height
高度上限(m)
float
1000
max_course_diff
最大航向差(°)
float
180
max_lostcount
允许丢失次数
int
3
max_forecastcount
最大预推次数
int
1
数据入口:
public void Input(byte[] buffer),buffer:通过网络从雷达信处获取的 1400 字节数据。
获取雷达当前角度:
使用 float ServoAngle 可获取当前角度,范围[0,360)度。
方位标定:
public void Calibration(),将当前雷达面指向作为正北零度。
航迹输出:













