机器人机械臂手册简例分析
需积分: 4 62 浏览量
2023-07-01
20:55:33
上传
评论
收藏 5.05MB PDF 举报


MZ07-CFD
page 29
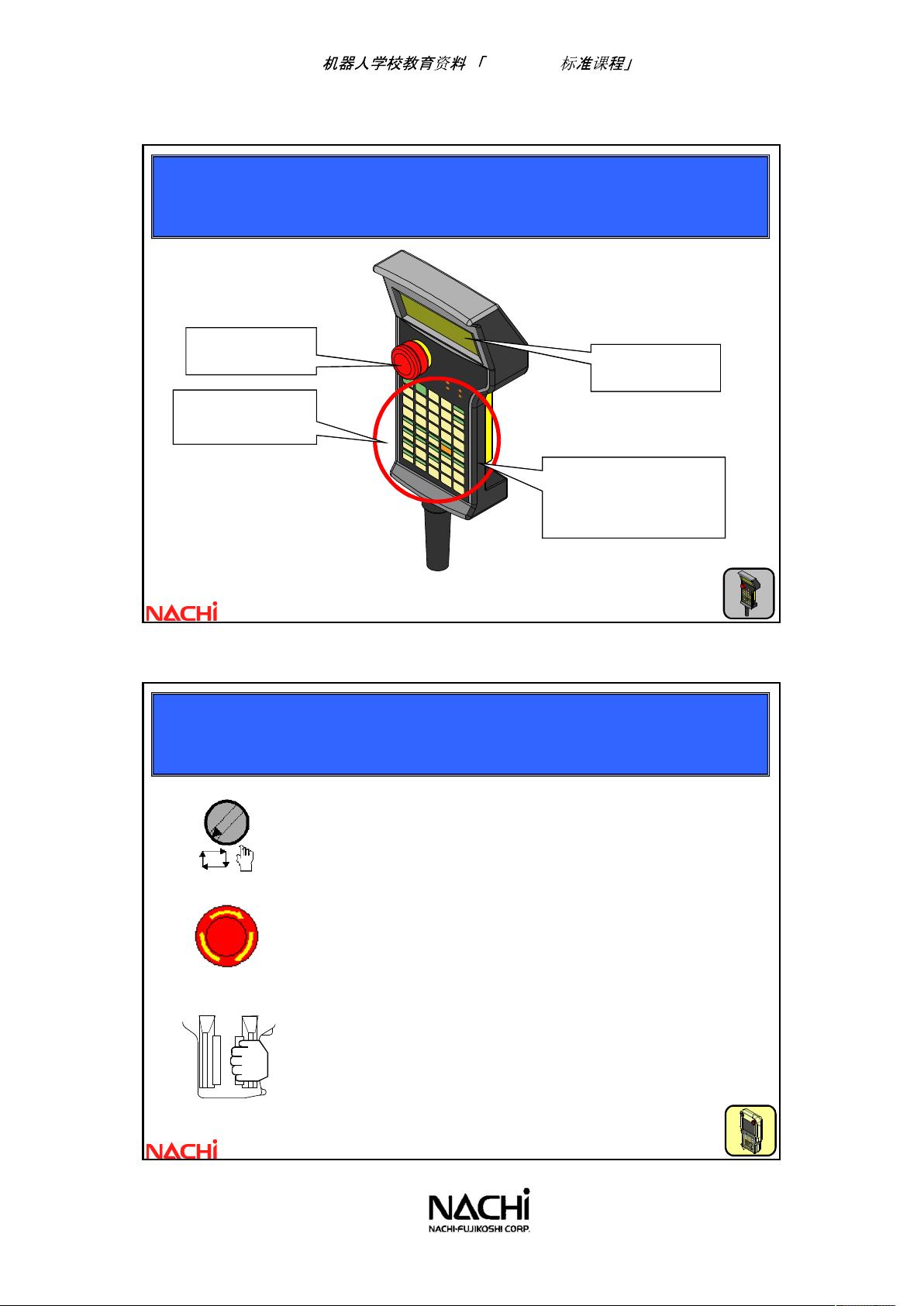
基本画面(示教模式)
基本画面(示教模式)基本画面(示教模式)
基本画面(示教模式)基本画面(示教模式)
基本画面(示教模式)基本画面(示教模式)
基本画面(示教模式)
模式
(示教)
已选择的程序号
当前程序行号
时间和日期
F键表示的
区域
※在画面的左
右两侧
已选择的
机械装置
手动/检查
速度
[显示器区域]
・程序显示器
・轴监视器
等表示。
坐标系
表示焊枪的状态
参数设定菜单
维修菜单
page 30
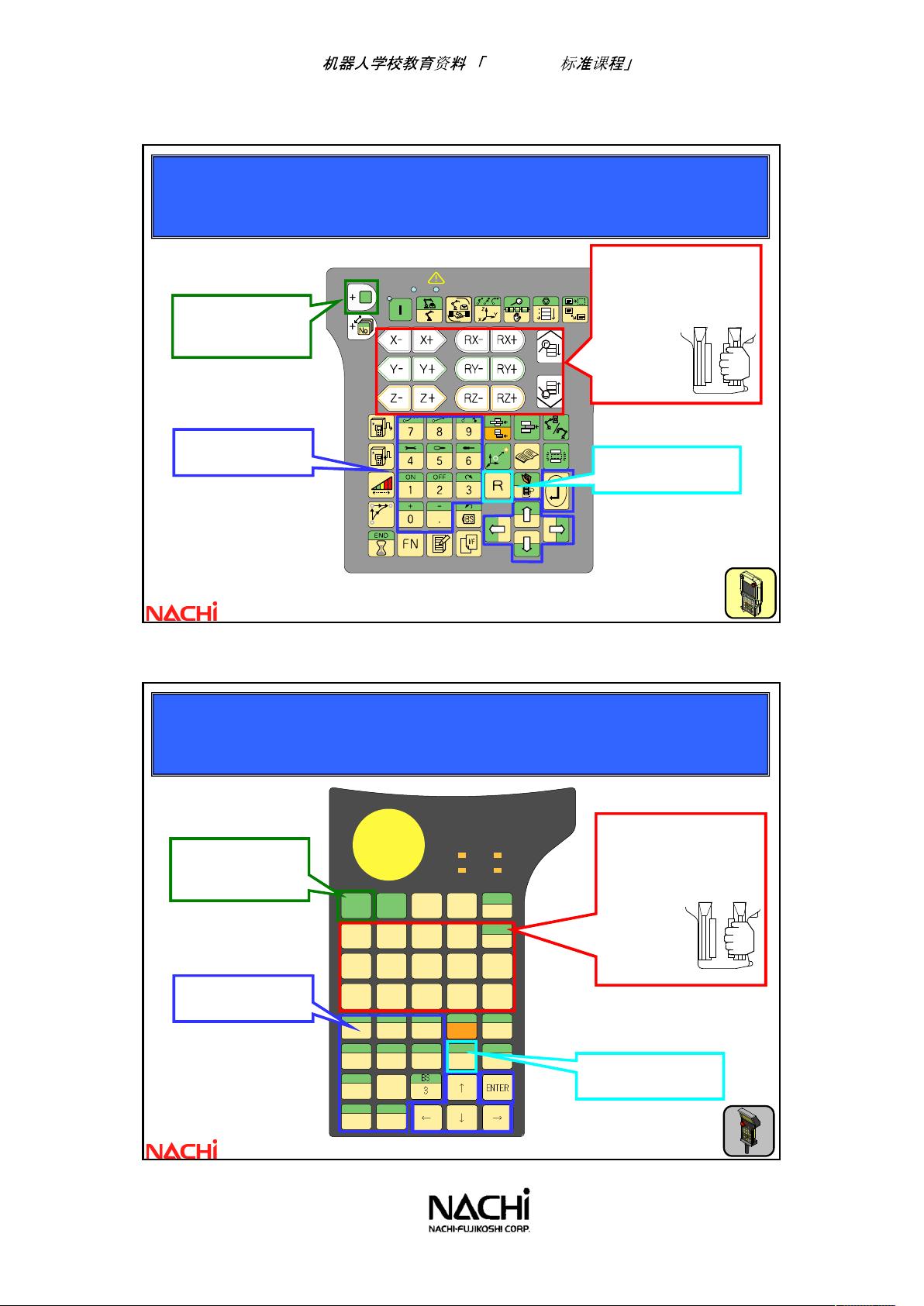
基本画面(示教模式)
基本画面(示教模式)基本画面(示教模式)
基本画面(示教模式)基本画面(示教模式)
基本画面(示教模式)基本画面(示教模式)
基本画面(示教模式)
已选择的程序号
当前程序行号
已选择的
机构
手动/检查
速度
坐标系
J :轴坐标系
LR :机械坐标系
LT :工具坐标系
已选择的
单元
插补类型
JT :关节插补
LN :直线插补
C1,C2 :圆弧插补

剩余34页未读,继续阅读
资源评论













