2008-01-0579
Model-Based Design of a SUV anti-rollover control system
Vinod Cherian, Rohit Shenoy, Alec Stothert, Justin Shriver, Jason Ghidella
The Mathworks, Inc.
Thomas D. Gillespie
Mechanical Simulation Corporation.
Copyright © 2008 The MathWorks, Inc. & Mechanical Simulation
Corporation
ABSTRACT
This article presents a methodology to apply Model-
Based Design to develop and automatically optimize
vehicle stability control systems. Such systems are
employed to improve the dynamic rollover stability of
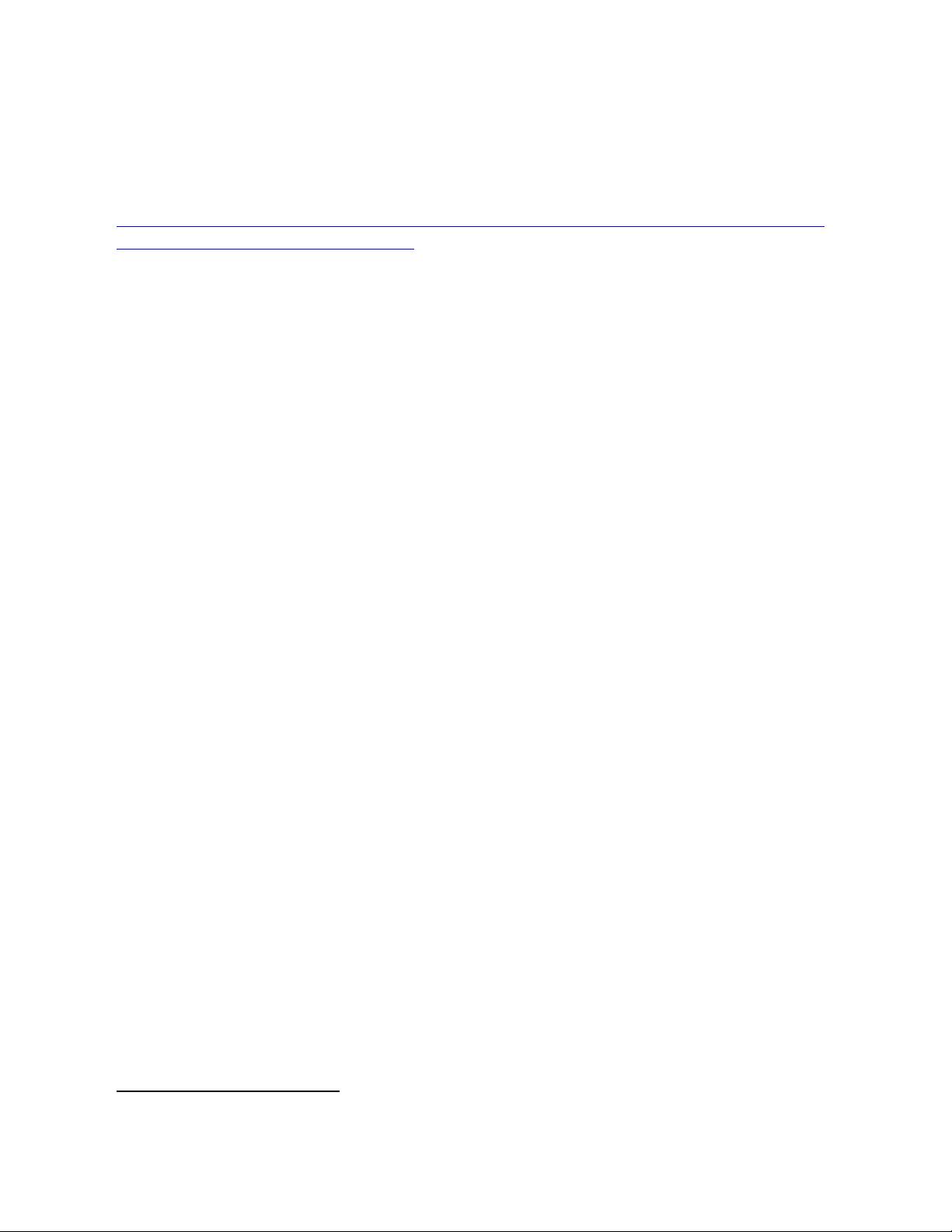
Sport Utility Vehicles (SUVs). A non-linear vehicle
model, representative of a midsize SUV, was built in
CarSim®. This vehicle model is used in Simulink® to
design a control system that reduces the risk of rollover.
Optimization methods are then used to automatically
adjust controller parameters to meet the system
specifications that ensure the stability of the vehicle.
Cosimulation between the two software packages
enables rapid design and verification of control
algorithms in a virtual environment. The results of the
simulation experiments can be visualized through a 3-D
animation of vehicle motion. The control system is
adapted for the specific vehicle model, enabling it to
remain stable under standard test conditions. The
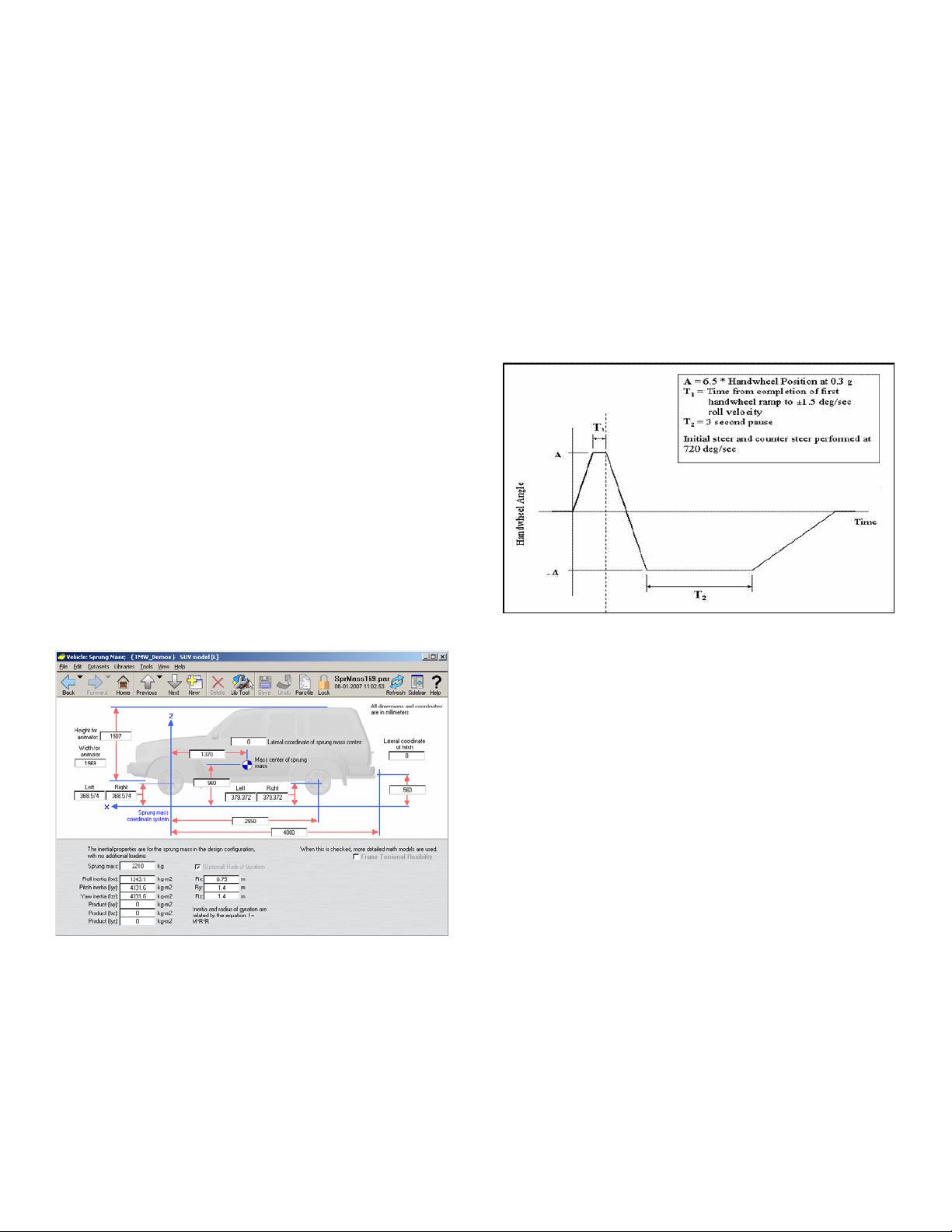
National Highway Traffic Safety Administrations'
(NHTSA) fishhook maneuver was used to estimate
dynamic rollover stability of the vehicle and benchmark
the performance of the SUV both with and without the
optimized controller.
INTRODUCTION
According to NHTSA's National Center for Statistics and
Analysis, from 1991 to 2001 the number of passenger
vehicle occupants killed in all motor vehicle crashes
increased 4 percent, while fatalities in rollover crashes
increased 10 percent. In the same decade passenger
car occupant fatalities in rollovers declined 15 percent
while rollover fatalities in light trucks increased 43
percent. In 2001, 10,138 people died in rollover crashes,
a figure that represents 32 percent of occupant fatalities
for the year. Of those, 8,407 were killed in single-vehicle
rollover crashes. The U.S. Fatality Analysis Reporting
System shows that 54 percent of light vehicle occupant
fatalities in single-vehicle crashes involved a rollover
event [1]. In response to these trends, NHTSA has been
evaluating rollover testing since 1993. The estimated
risk of rollover differs by light vehicle type: 10 percent of
cars and 10 percent of vans in police-reported single-
vehicle crashes rolled over compared to 18 percent of
pickup trucks and 27 percent of SUVs. This is because
SUVs and similar vehicles with a higher ground
clearance usually have a high center of gravity, and
consequently a lower Static Stability Factor (SSF), as
compared to a sedan or a sports car. As a result, the
vehicle is more likely to rollover, as explained in books
on vehicle dynamics [2].
Modern SUVs come with a wide range of onboard
electronics for a variety of controls, ranging from engine
and drive-train control to chassis and body electronics
controls. Among these controls, Electronic Stability
Control (ESC) systems, also known as Vehicle Stability
Control (VSC) systems, are typically integrated into the
vehicle as part of the onboard active safety system. In
recent years traditional traction and brake control
systems have been redesigned to incorporate anti-
rollover capabilities. These controllers help reduce the
risk of a vehicle entering an undesired state, such as a
rollover, where the vehicle is not under the complete
control of the driver. One of the methods of reducing the
risk of rollover is to implement differential braking
controller logic in the Electronic Stability Controller that
prevents the vehicle from entering high rate of turn
maneuvers with a high velocity [3][4][5][6]. In the U.S.,
federal standards require all vehicles after the 2011
model year to have ESC logic built in [7]. Designing and
testing these control systems in real vehicles on a track
can be dangerous, and expensive. Ensuring test
conditions are consistent from test to test can also be a
significant challenge.
The design and testing of control systems using Model-
Based Design accelerates the development process by
reducing the need for track testing, which is normally
much more expensive and time-consuming than
simulation. In addressing the rollover problem,
simulation can be used to study the vehicle response to
various steering maneuvers. These test simulations can
be repeated while varying parameters such as road
surfaces, tire models, and vehicle properties. Tests in
simulation also eliminate the variability introduced by
human-in-the-loop testing.