

基于扩展卡尔曼滤波的目标跟踪系统的设计
目录
1 扩展卡尔曼滤波的原理..................................................................................1
1.1 标准卡尔曼滤波 ...................................................................................1
1.1.1 卡尔曼滤波的基本公式 ..............................................................1
1.1.2 已知条件 ......................................................................................1
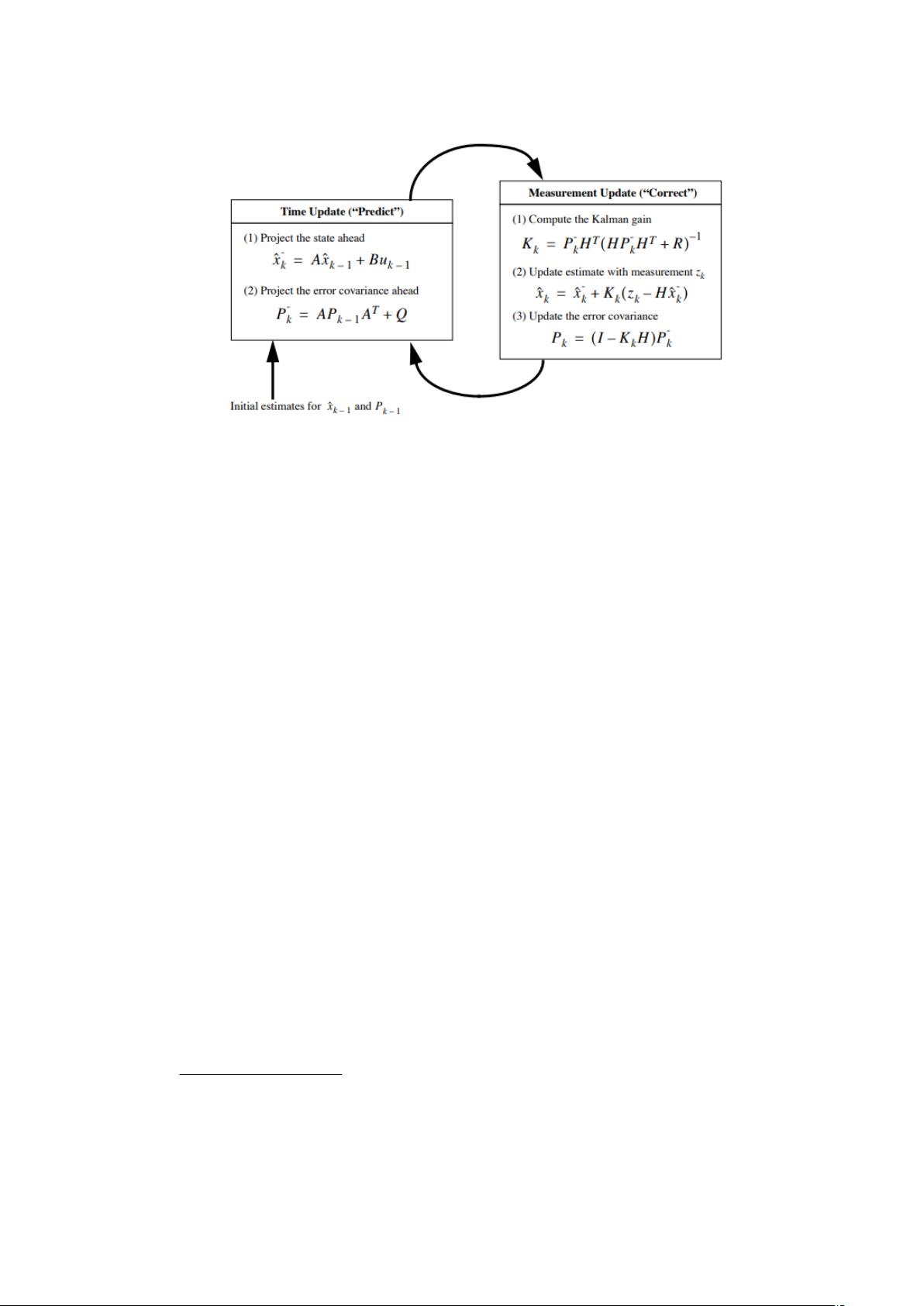
1.1.3 预测阶段 ......................................................................................1
1.1.4 更新阶段 ......................................................................................2
1.1.5 卡尔曼滤波的推导 ......................................................................3
1.2 扩展卡尔曼滤波 ...................................................................................4
1.2.1 符号定义 ......................................................................................4
1.2.2 非线性方程线性化 ......................................................................4
1.2.3 扩展卡尔曼滤波的公式 ..............................................................6
2 扩展卡尔曼滤波的算法..................................................................................7
2.1 扩展卡尔曼滤波计算流程 ...................................................................7
2.2 扩展卡尔曼滤波的函数 .......................................................................8
2.2.1 使用语法 ......................................................................................8
2.2.2 输入参数 ......................................................................................9
2.2.3 属性 ..............................................................................................9
2.2.4 输出参数 ....................................................................................14
3 目标跟踪系统的模型....................................................................................14
3.1 系统模型 .............................................................................................14
3.1.1 状态方程 ....................................................................................14
3.1.2 观测方程 ....................................................................................15
3.1.3 线性化观测方程 ........................................................................15
4 代码分析........................................................................................................17
5 仿真实验结果................................................................................................20
5.1 基本结果展示 .....................................................................................20
5.2 误差分析 .............................................................................................23
5.3 参数调整 .............................................................................................25
6 讨论与总结....................................................................................................28
6.1 技术亮点 .............................................................................................28
6.2 扩展卡尔曼滤波的缺点 .....................................................................29
6.3 问题及解决 .........................................................................................29
7 参考文献........................................................................................................35
8 附录................................................................................................................35



剩余41页未读,继续阅读
资源评论













