2013,49(22)
基金项目:重庆市科技攻关项目(No.CSTC2010AA5049);重庆市高校创新科研项目(No.12A19369)。
作者简介:毛玉星(1967—),男,副教授,博士后,从事图像处理与计算机视觉,计算机测量与仪器研究。E-mail:myx@cqu.edu.cn
收稿日期:2012-07-07 修回日期:2012-09-06 文章编号:1002-8331(2013)22-0167-06
CNKI 出版日期:2012-10-11 http://www.cnki.net/kcms/d etail/11.2127.TP.20121 011.1015.009.html
汽车偏离车道线的图像分析与视觉计算方法
毛玉星,苗伽略,汪泉霖,王 艳
MAO Yuxing, MIAO Jialue, WANG Quanlin, WA NG Yan
重庆大学 输配电装备及系统安全与新技术国家重点实验室,重庆 400044
State Key Laboratory of Power Transmission Equipment & System Security and New Technology, Chongqing University, Chongqing
400044, China
MA O Yuxing, MIAO Jialue, WANG Quanlin, et al. Image analysis and vision computing methods for running deflection
of vehicles. Comput er Engineering and Applications, 2013, 49(22):167-172.
Abs tract:Focusing on the problems of lane detection and running deflection for autonomous land vehicles, a reliable approach for
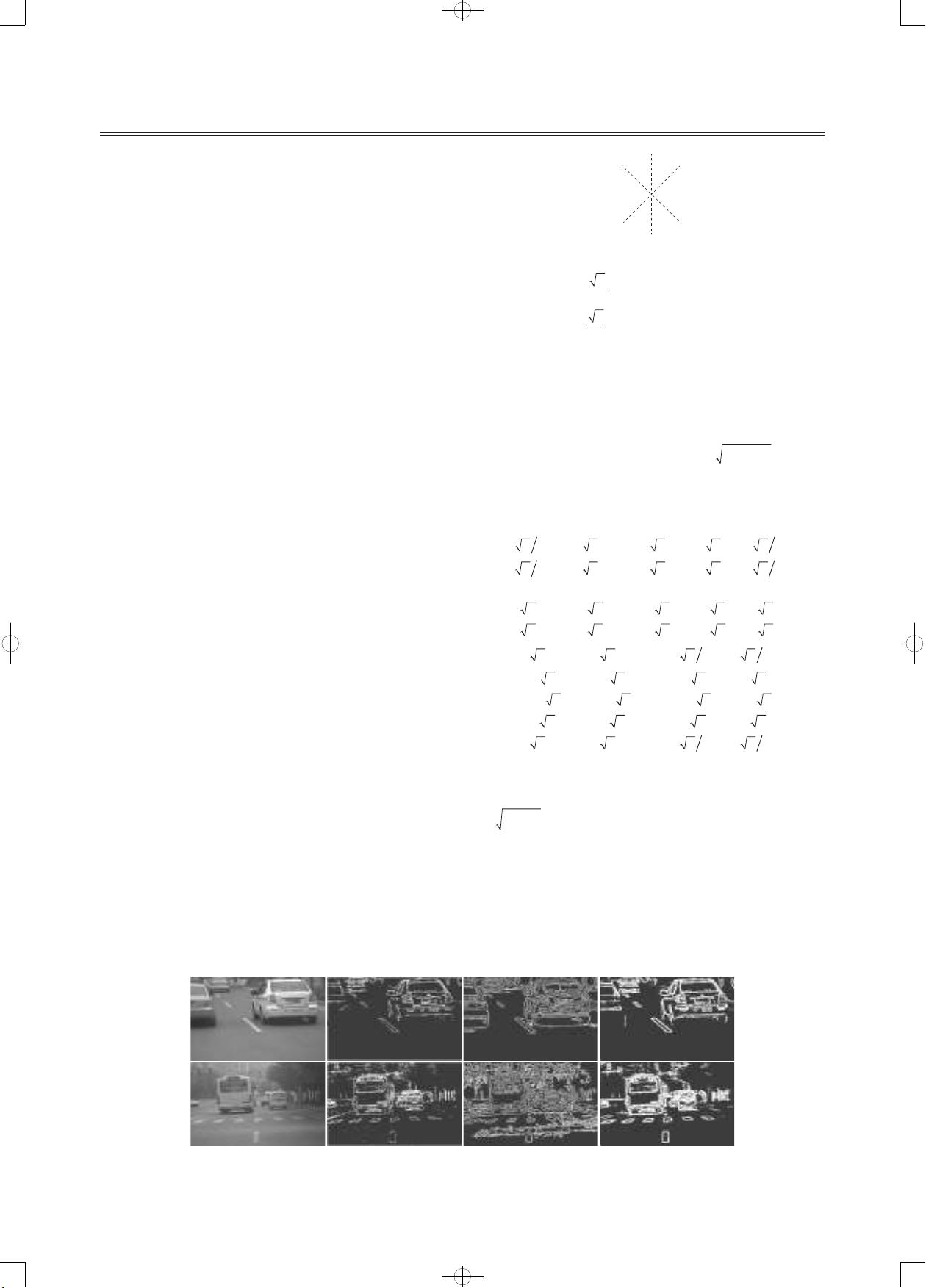
fast vision computing is proposed in this paper. Two 5×5 template operators o f directional filters are used to extract the edges of
the image. The image is binarized with an automatic th reshold derived from Otsu algorithm. To reduce the computationa l work, the
position characters of th e lanes in the image are concerned to remove the hori zontal contour points. Meanwhile, the constraint con-
ditions based on t he geometric characteristics a re also formulated t o eliminate the abundant points. After that, the lanes are detected
with Hough transform. With a coordinate system of 3D space, the pinhole camera model is adopted to ca lculate the de viation angles
and the vertical distances of the vehicle to the lanes. These parameters can be applied to estimate the lan e departure time with the
instant speed o f the ve hicle, which will be valuable for intelligent control and security early warning of the autonomous land vehicles.
Key words:computer vision; lane detection; e dge det ection; binarization; Hough transform
摘 要:针对汽车自主驾驶技术的车道检测和跑偏告警问题,提出了一种快速可靠的视觉计算方法。利用方向滤波算子
对路面图像进行 5×5 模板运算,得到边缘图像;采用 Otsu 自动阈值算法对图像进行二值化处理,并根据车道在图像中的位
置特性对边沿图像细化去点,减少后续处理运算量;在此基础上,根据车道几何特性引入约束条件,去除干扰点,并采用
Hough 变换检测出车道线;依据针孔摄像机模型建立空间坐标系,用于计算汽车相对于车道线的偏转角和垂直距离,估计
驶离车道的时间,为汽车自主驾驶中的安全预警及智能控制提供信息支撑。
关键词:计算机视觉;车道线检测;边缘检测;二值化;Hough 变换
文献标志码:A 中图分类号:TP3 91.41 doi:10.3778/j.issn.1002-8331.1207-0095
1 引言
近十年来,汽车自主驾驶技术
[1-3]
得到广泛关注并取得
突破性进展,并将在军事、智能交通等方面有广阔的应用
前景。汽车自主驾驶需采用多传感器、多信息融合方式,
将 GPS 定位信 息 、GIS 道路 信 息 与 即 时 路 面 信 息 终 合 分
析处理,形成人、车、路结合的智能控制系统。汽车自主驾
驶的核心 技术包 括汽车 跑偏告 警、前方车辆行人 等障碍
物识别
[4]
、自动泊车、周围环境感知等技术。其中,车道线
检测作为 汽车跑 偏预测 的关键 技术,成为学 者们的 研究
重点之一。
车道线检测的核心是图像分析与视觉计算
[5-6]
。图像分
析的目的是获取车道线特征点,并要求满足实时性、鲁棒性、
实用性。用于车道线识别的图像分析技术一般包括灰度化、
图像滤波、边沿增强、二值化等预处理步骤。考虑到在实际的
汽车行驶环境中,光照变化、车道线不规则、雨水覆盖、阴影干
扰以及相邻车辆的遮挡等影响因素,近五年来,学者们提出很
多解决的方案及算法
[7-9]
,如尺度不变特征转换(SIFT)
[10 ]
、边界
点分类
[11-12]
、反透视变换(IPM)
[1,13]
、颜色空间转换(CSC)
[11]
等。
车道线检测通用方法是在局部区域内将车道线视为
直线。在获得车道特征信息后,采用相关算法获得车道线
的直线方程。其中被广泛采用的有 Hough
[4,8,13]
变换和随机
抽样一致性算法(RA NSA C)
[5,11,14]
。近年来,一些学者也在
尝试新的算法,如模糊算法(fuzzy logic)
[2,15]
、基于几何模
型与 Gabor 滤波器的算法
[16 ]
、约束 Delaunay 三角化
[3]
等。对
车道线检测性能的判定包括实时性和准确性因素,Hough
在曲线检测方面具有良好性能,但由于严重依赖于参与投
C omputer Engineering and Applications 计算机工程与应用
167