
Deep Residual Learning for Image Recognition
Kaiming He Xiangyu Zhang Shaoqing Ren Jian Sun
Microsoft Research
{kahe, v-xiangz, v-shren, jiansun}@microsoft.com
Abstract
Deeper neural networks are more difficult to train. We
present a residual learning framework to ease the training
of networks that are substantially deeper than those used
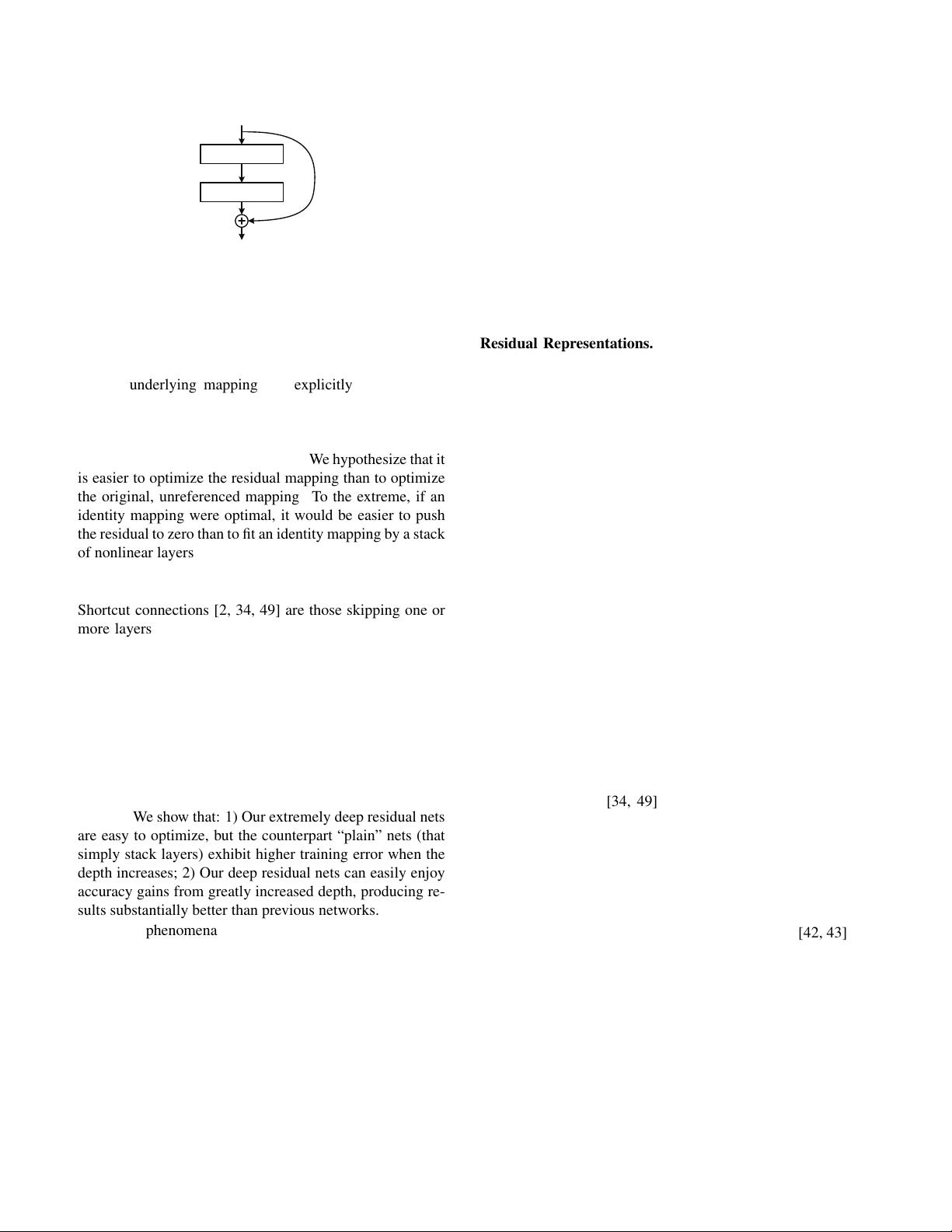
previously. We explicitly reformulate the layers as learn-
ing residual functions with reference to the layer inputs, in-
stead of learning unreferenced functions. We provide com-
prehensive empirical evidence showing that these residual
networks are easier to optimize, and can gain accuracy from
considerably increased depth. On the ImageNet dataset we
evaluate residual nets with a depth of up to 152 layers—8⇥
deeper than VGG nets [41] but still having lower complex-
ity. An ensemble of these residual nets achieves 3.57% error
on the ImageNet test set. This result won the 1st place on the
ILSVRC 2015 classification task. We also present analysis
on CIFAR-10 with 100 and 1000 layers.
The depth of representations is of central importance
for many visual recognition tasks. Solely due to our ex-
tremely deep representations, we obtain a 28% relative im-
provement on the COCO object detection dataset. Deep
residual nets are foundations of our submissions to ILSVRC
& COCO 2015 competitions
1
, where we also won the 1st
places on the tasks of ImageNet detection, ImageNet local-
ization, COCO detection, and COCO segmentation.
1. Introduction
Deep convolutional neural networks [22, 21] have led
to a series of breakthroughs for image classification [21,
50, 40]. Deep networks naturally integrate low/mid/high-
level features [50] and classifiers in an end-to-end multi-
layer fashion, and the “levels” of features can be enriched
by the number of stacked layers (depth). Recent evidence
[41, 44] reveals that network depth is of crucial importance,
and the leading results [41, 44, 13, 16] on the challenging
ImageNet dataset [36] all exploit “very deep” [41] models,
with a depth of sixteen [41] to thirty [16]. Many other non-
trivial visual recognition tasks [8, 12, 7, 32, 27] have also
1
http://image-net.org/challenges/LSVRC/2015/ and
http://mscoco.org/dataset/#detections-challenge2015.
0 1 2 3 4 5 6
0
10
20
iter. (1e4)
training error (%)
0 1 2 3 4 5 6
0
10
20
iter. (1e4)
test error (%)
56-layer
20-layer
56-layer
20-layer
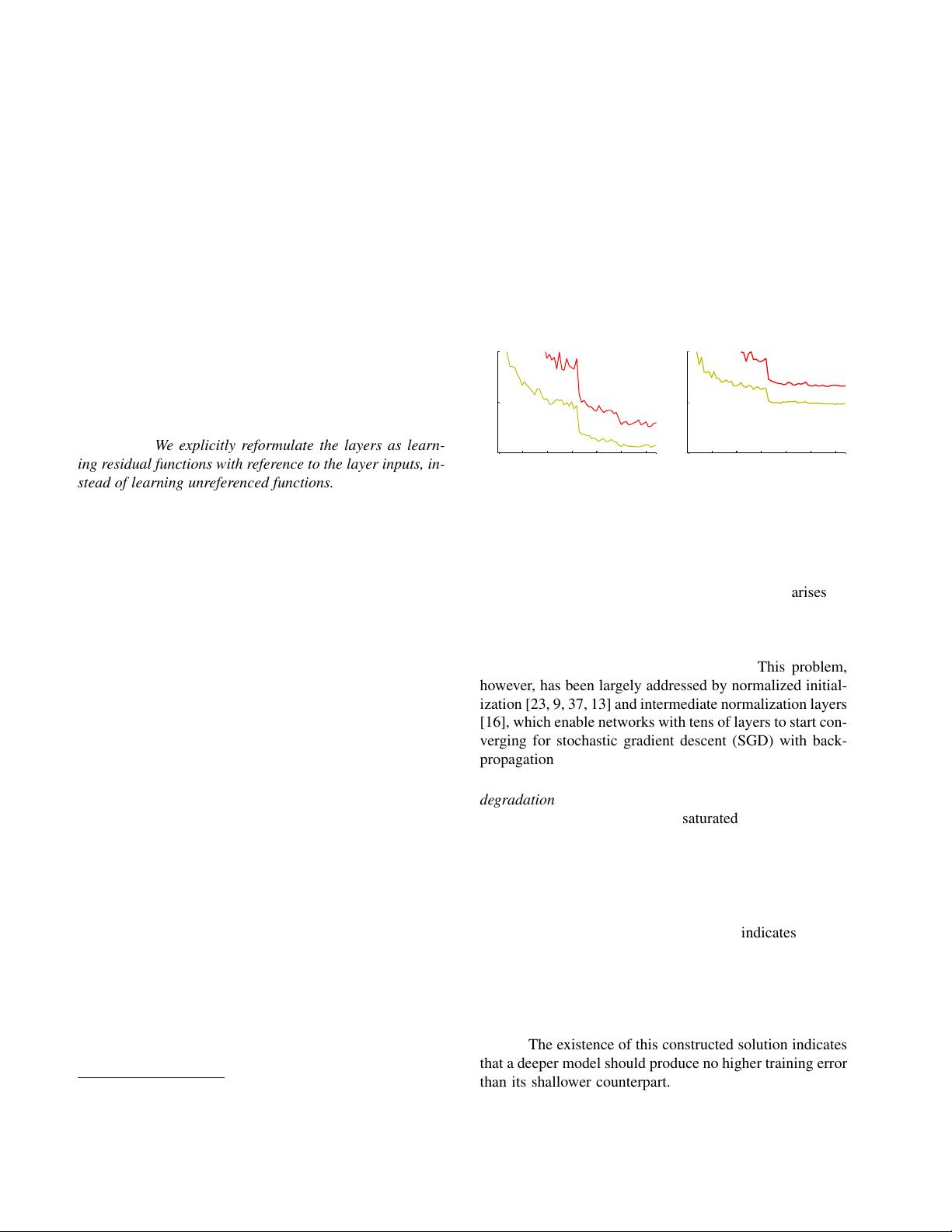
Figure 1. Training error (left) and test error (right) on CIFAR-10
with 20-layer and 56-layer “plain” networks. The deeper network
has higher training error, and thus test error. Similar phenomena
on ImageNet is presented in Fig. 4.
greatly benefited from very deep models.
Driven by the significance of depth, a question arises: Is
learning better networks as easy as stacking more layers?
An obstacle to answering this question was the notorious
problem of vanishing/exploding gradients [1, 9], which
hamper convergence from the beginning. This problem,
however, has been largely addressed by normalized initial-
ization [23, 9, 37, 13] and intermediate normalization layers
[16], which enable networks with tens of layers to start con-
verging for stochastic gradient descent (SGD) with back-
propagation [22].
When deeper networks are able to start converging, a
degradation problem has been exposed: with the network
depth increasing, accuracy gets saturated (which might be
unsurprising) and then degrades rapidly. Unexpectedly,
such degradation is not caused by overfitting, and adding
more layers to a suitably deep model leads to higher train-
ing error, as reported in [11, 42] and thoroughly verified by
our experiments. Fig. 1 shows a typical example.
The degradation (of training accuracy) indicates that not
all systems are similarly easy to optimize. Let us consider a
shallower architecture and its deeper counterpart that adds
more layers onto it. There exists a solution by construction
to the deeper model: the added layers are identity mapping,
and the other layers are copied from the learned shallower
model. The existence of this constructed solution indicates
that a deeper model should produce no higher training error
than its shallower counterpart. But experiments show that
our current solvers on hand are unable to find solutions that
1
arXiv:1512.03385v1 [cs.CV] 10 Dec 2015

剩余11页未读,继续阅读
资源评论



不脱发的程序猿
- 粉丝: 26w+
- 资源: 5887









最新资源
- 实验2-实验报告(1).doc
- 实验4-实验报告.doc
- 实验6-实验报告-模板.doc
- 实验5-1-实验报告.doc
- 实验5-实验报告.doc
- 实验4-讲稿-进程通信.docx
- 实验7-1实验报告-模板.doc
- 实验7-2实验报告-模板.doc
- 实验8-实验报告-模板.doc
- 在win32汇编环境中使用GDI+显示jpg图片
- 有源滤波器matlab simulink 采用simulink搭建有源滤波器模型,有操作视频和报告资料,运行稳定,效果显著
- C++大作业:实现小游戏《飞翔的小鸟》完整代码
- 基于SSM的珠宝商城后台管理系统
- Halcon液位检测例程代码与图像资源
- 仅仅是被引用的一张小小的图片
- PHP开发的QQ互联分发源码V1.0 无需申请对接QQ登陆
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


