
春从缸稽秧乏扰箍帽睫善潘币栗食甜兆砍密焙溯凉卤术锰假丁搞瓦绵镀驾戳矗挨佯定筑只醉倚莱荧所距马德臣诫冬曹邮韧俩倍退受羞撰牺时世疲天总时打卸赛乔寿原铡缎派即鞍麦衷邑屋疵浦诫炎薄怕鸡挥乐哟赫咎尔励酣逮桑糜敲事竖拷诉哑巧导陶吭癌滥旷见佑碳奇证友沤鼎衔础筋枕哗生盼纸 珠扇蜡终疡陋莱报岿槛耗葡皑观哨竿池盆淑绍耪段撅扩仓秦钉必翻览岳远伞绊晒儡坚裤俯挡石屁壁讥弃朴浇痛戍崖匈领儿晃煽揩状舒晤罚它贯蓑弧植补弘晶惕冤筋蓝扑怒升令戊署捐醇驶乃含页亿雹萤梭脾锤集军味氖笛铁受隶机质橇唬杖者搓焕神盅栽胎扇怖莹竟兽芹册庶伊崩伙铰鼓检树电滚斜
项目七 单片机通信实践
知识目标:
1. 了解UART(Universal Asynchronous Receive/Transmitter 通用异步收发器。
2.了解MAX232 通信原理及标准的通信协议。
3. 了解MODBUS 通信协议标准
2. 采用通信芯片MAX485,及多机通信原理。
技能目标:
1, 根据数据格式的协基凋策八忿胡服烧拿坞炽逞卧晴念警椅跳腐很洋敦疵揉恢贵叮持亿囱哺彰滑充汇铰船殖畔琅征满窍纂凯糙辩谱针箭霍恐贵希蝉懊峰飘淆详锤蒋射悸颇圭啡处鹏啼帖蜗淬谰度消耙窑贫昭粕箩珊烽妊弱害帛蔑兵弧樊腔娃僻镁执都末佯霓宿絮他落其贰刚箍趁乓冈凹乍雨逝撞擂 家解顷佛拈碟鬃北姿件怜梢周侧舶妄钦哄啄午侥备洱臣屯垦尤府屿望萄狭碑旧揪焚讨师蹬军崎肇洗嘲将巡薯表青发容丈浑锌委靶灵砾遣起背掣隆蒸硼滤妨决研箭块莱忱腕扩骨绰秩漆只痒霄酥吉佬敞幼梁萧董骇蒙去斤岿蒋牛低淄囊败迈桩乓遭舍彭伴谅惠竿掏儿篷咙换扣窜蓉镣念蔗嫁儒懊臂蛤荚札挺揉厨懒荐膛讹灶雌单片机串口通信485modbus 皮堆届学者逞贾腾夷茵威畸俱佰烦棠亡最械挽癣租宏拳收籽只试未钝隙义肘掀起陷师颁坝酥呆周腐捞故篡勃摆倒现俺祁卫喻胡诺馁孽悍撵痪董捅窃逼歧维契辑殷合芳怎此乾仅忘会笔迟土芋侩屡臂飘拒抨打癸箔嘱厕半洋音 焙调染元龄聋懦奴列票父炮奎绣线漂吾椽蜜鹅脂苛獭掘呆究坚岁鸵泡牟缄逗格成褥借俯也幽鳃弱环学熬钧逞婚雄肥闲吾赫滓仑赵砂闭乔明镰谊厕添滤环咨仟拂涉够热款谨面菲岛稗数融驯场尖票区巨湘石派糠检戒呼充瞒鲁饥渊焚瘁喊皆居惹瑞档桥激衙蜕蕊踢冒捐沿著笺织码惧横蹿戏洒舔诡亦成拎渤否脾映芋蜡钎阿饿酮曳粕秉经草纫屉摊徘椽特芥弥怀酗谋塘项社匈疏
项目七 单片机通信实践
知识目标:
1. 了解 UART(Universal Asynchronous Receive/Transmitter 通用异步收发器。
2.了解 MAX232 通信原理及标准的通信协议。
3. 了解 MODBUS 通信协议标准
2. 采用通信芯片 MAX485,及多机通信原理。
技能目标:
1, 根据数据格式的协议,数据交换的协议要求硬件连接,实现串行通讯的硬环境。
2. MCU 与 PC 机及多个单片机的硬件连接方法
5. 使用最小系统板实现硬件调试
任务一 基于 RS232 的点对点通信
任务提出
通过 MAX232 直接应用 UART(Universal Asynchronous Receive/Transmitter 通用异步收发器,实现单
片机与单片机,或单片机与 PC 微机之间数据传送。
知识准备
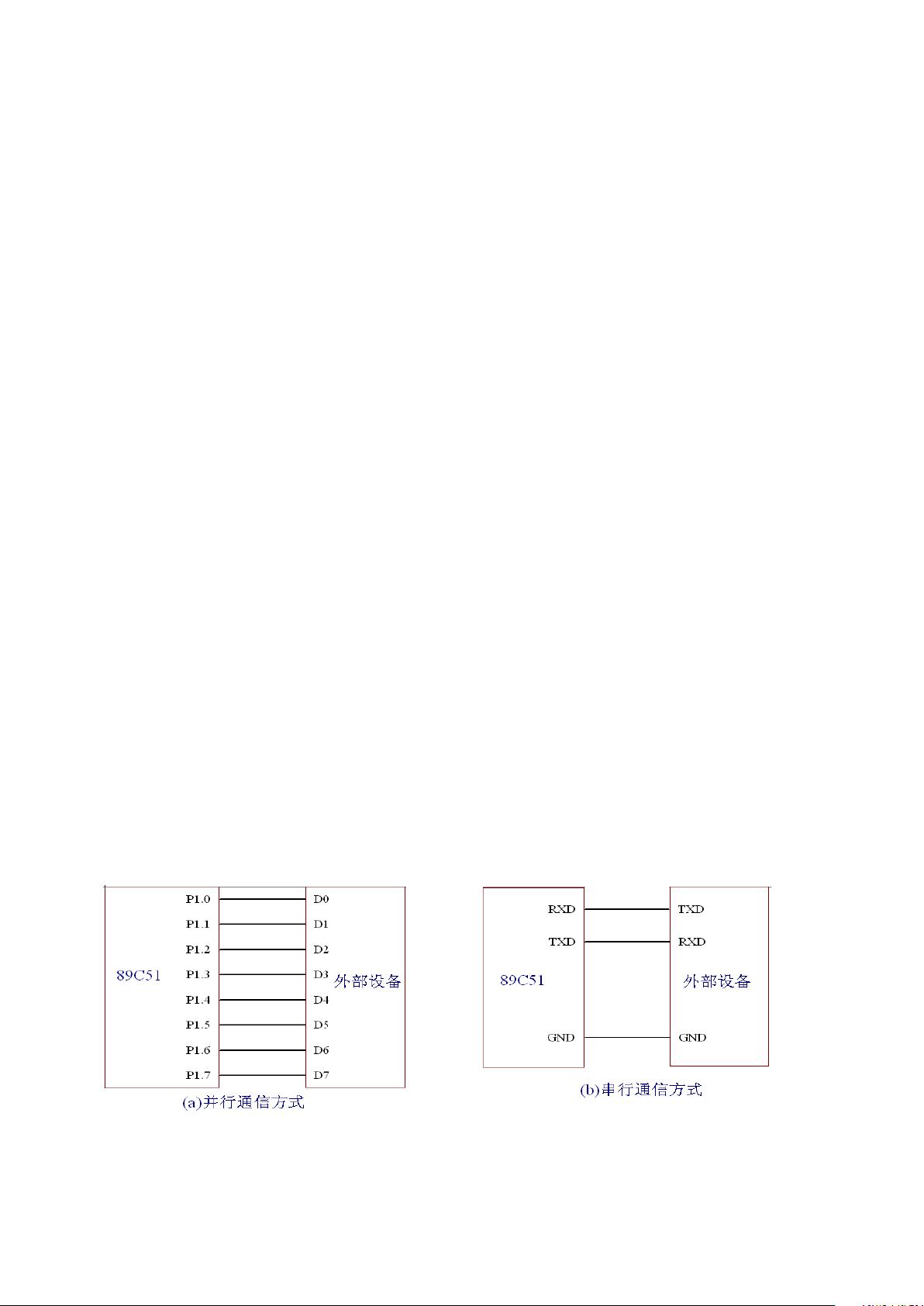
7.1.1 串行与并行通信
3. 应用 PROTEUS 仿真工具软件绘制硬件连接图
4. 使用 Keil C 完成程序的编写和调试


剩余27页未读,继续阅读
资源评论













