根据提供的文件信息,我们可以深入探讨ABB工业机器人的编程基础及其具体操作方法,特别是RAPID编程语言中的关键概念和指令。
### RAPID编程基础
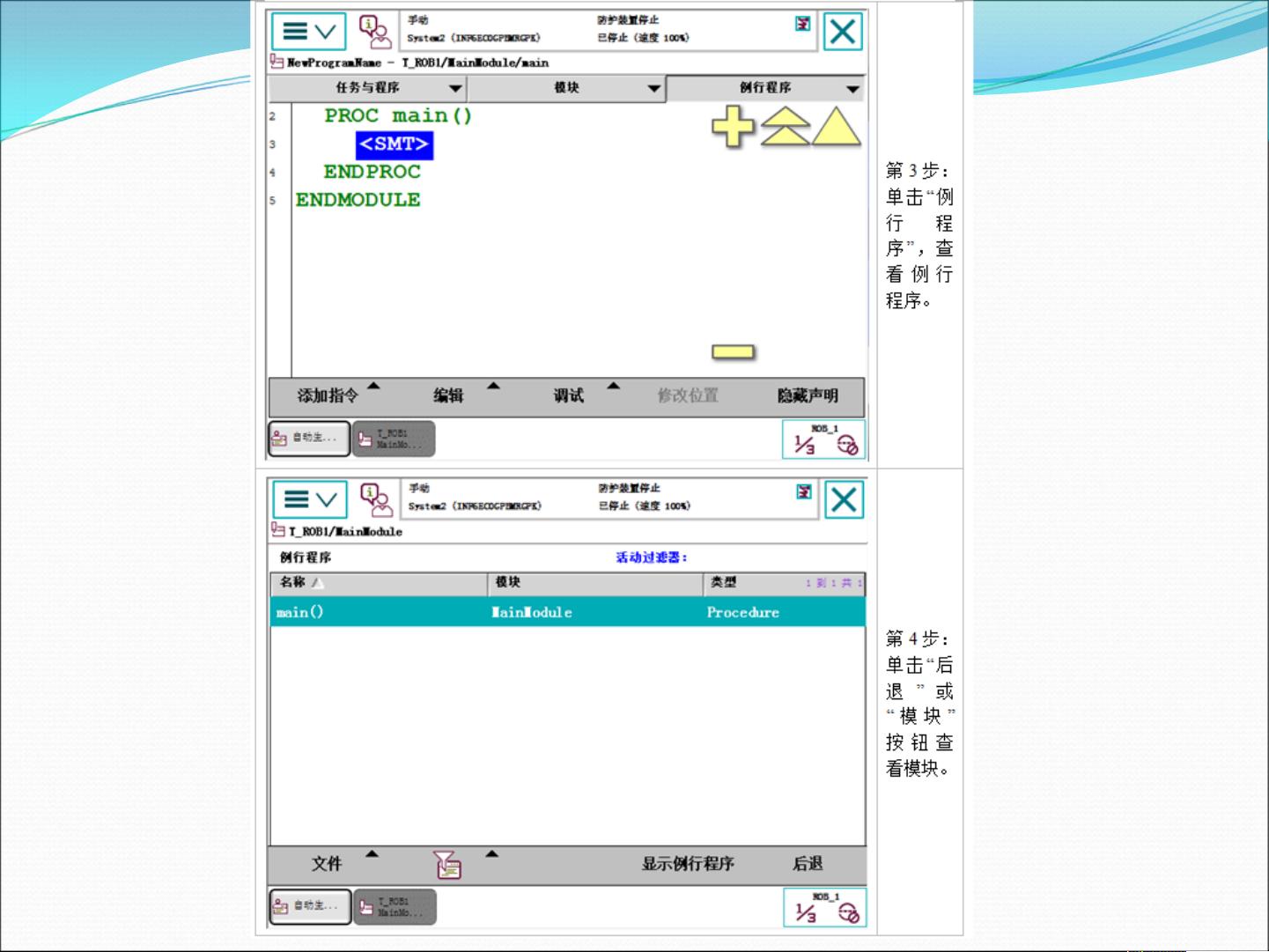
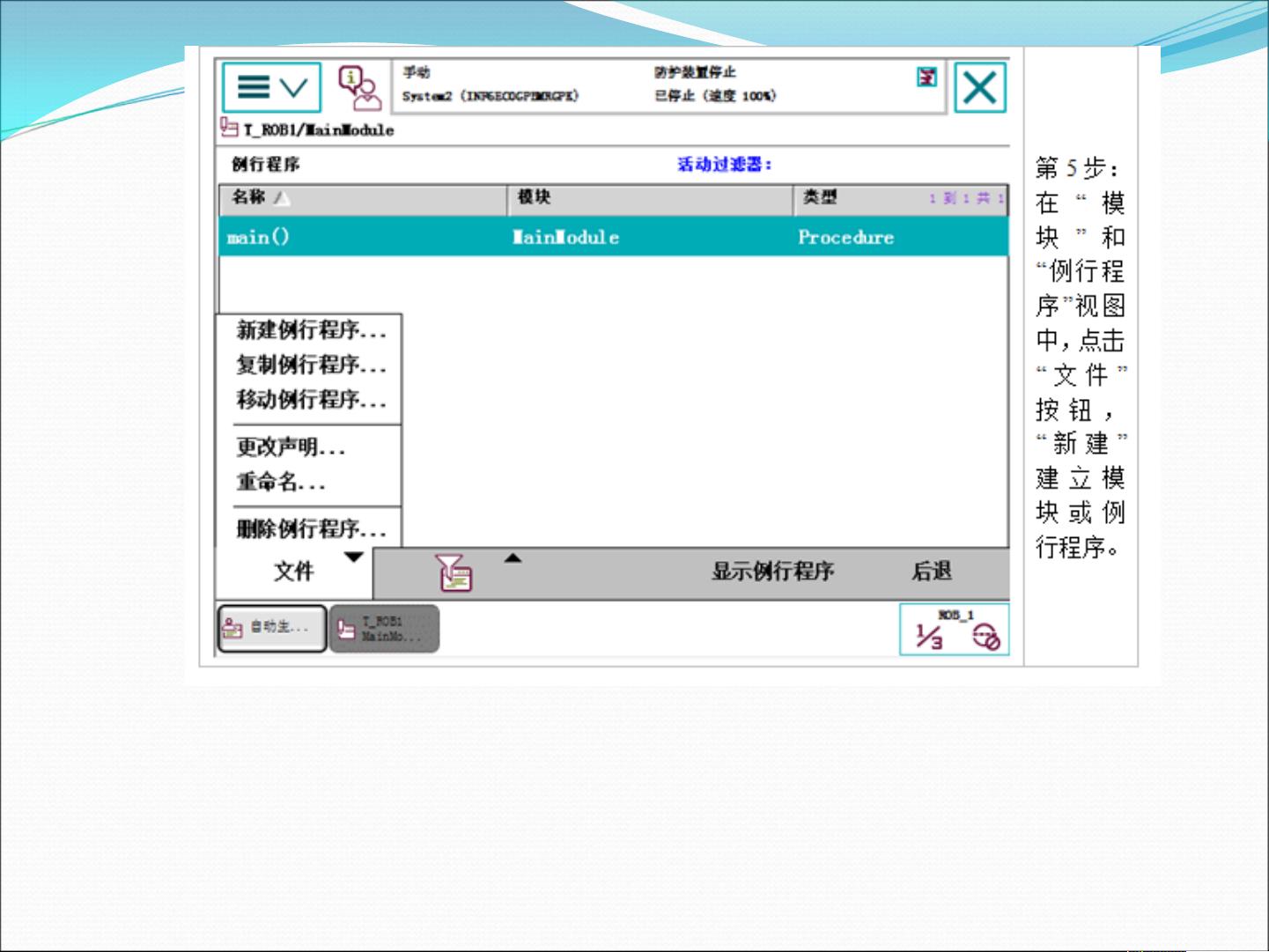
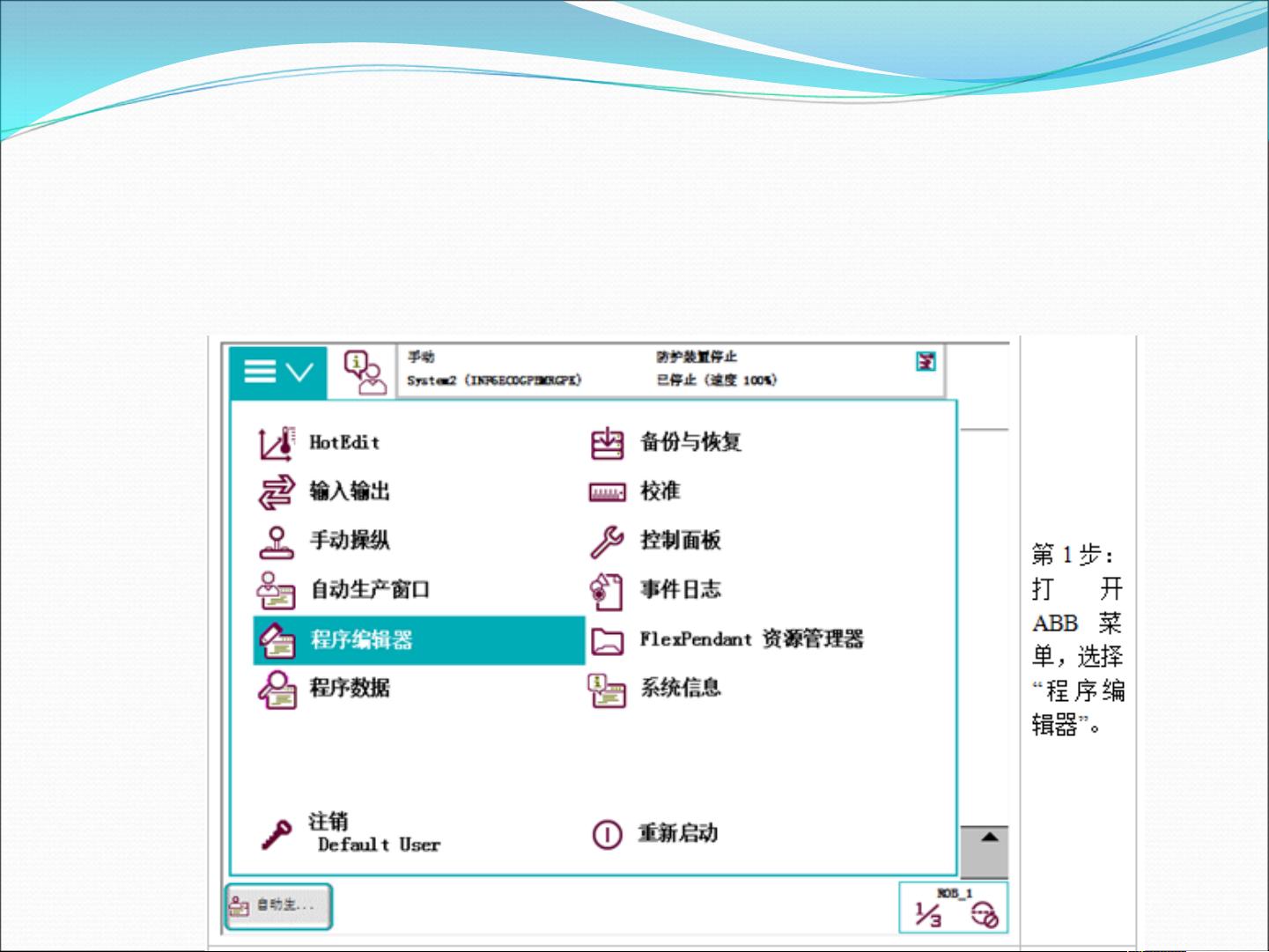
#### 1. 建立RAPID程序
RAPID(Robot Application Programming Interface and Description)是ABB工业机器人使用的专用编程语言。在开始编写程序之前,首先需要创建一个新的RAPID程序。这通常涉及到以下几个步骤:
- **新建程序**:在RobotStudio软件中创建一个新的RAPID程序。
- **定义程序结构**:包括主程序(main)、例行程序(routine)、模块(module)等。
- **编写代码**:使用RAPID指令来实现特定的功能。
#### 2. RAPID基本指令
RAPID语言提供了一系列基本指令,用于控制机器人的各种动作和逻辑处理。
##### 2.1 赋值指令
赋值指令用于设置变量的值,是RAPID编程中最基本的操作之一。赋值使用“:=”符号。
- **常量赋值**:例如`reg1:=17;`,这里`reg1`被赋值为`17`。
- **数学表达式赋值**:如`reg2:=reg1+8;`,表示将`reg1`的值加上`8`后赋给`reg2`。
操作步骤包括:
1. 打开RAPID编辑器。
2. 在相应的例行程序中插入赋值指令。
3. 指定赋值对象和值。
##### 2.2 运动指令
运动指令用于控制机器人在空间中的移动。主要有以下几种类型:
- **关节运动(MoveJ)**:这种指令使机器人以最快的方式从一个点移动到另一个点,不考虑中间路径。适用于路径精度要求不高的场景。
- **线性运动(MoveL)**:确保机器人沿着直线路径从一个点移动到另一个点。适用于需要精确路径的应用场景。
- **圆弧运动(MoveC)**:使机器人沿着一个圆弧路径移动,通常用于焊接等需要精确路径的应用。
- **绝对位置运动(MoveAbsJ)**:通过指定六个轴的位置来确定机器人的目标位置。这种指令特别适用于需要机器人回到某个固定位置的情况。
#### 3. 绝对位置运动指令
绝对位置运动指令(MoveAbsJ)用于定义机器人各关节的角度,以达到指定的目标位置。
- **语法**:`MoveAbsJ Target, vSpeed, zZone, tool, wobj;`
- `Target`:包含六个轴角度的目标位置数据。
- `vSpeed`:移动速度。
- `zZone`:转弯区数据,控制接近目标位置的速度。
- `tool`:使用的工具坐标系。
- `wobj`:工作的对象坐标系。
示例:
```rap
MoveAbsJ jpos10 \NoEOffs, v1000, z50, tool1\Wobj:=wobj1;
```
其中,`jpos10`是目标位置数据,`v1000`表示速度为1000mm/s,`z50`表示转弯区为50mm,`tool1`和`wobj1`分别指定了工具坐标系和工作对象坐标系。
#### 4. 关节运动指令
关节运动指令(MoveJ)使机器人快速地从一个点移动到另一个点,不关注路径细节。
- **语法**:`MoveJ Target, vSpeed, zZone, tool, wobj;`
- `Target`:目标点。
- `vSpeed`:移动速度。
- `zZone`:转弯区数据。
- `tool`:工具坐标系。
- `wobj`:工作对象坐标系。
### 总结
通过上述内容,我们了解了ABB工业机器人编程的基础知识,包括如何创建RAPID程序、使用赋值指令以及掌握几种基本的运动指令。这些指令对于控制机器人执行复杂的任务至关重要。熟练掌握这些基本操作有助于开发者更高效地利用ABB工业机器人完成各种自动化任务。