

Big World Camera 分析
3D 任何物体最终的位置 为一个 Modle * View * Projection 矩阵
Modle 为模型的世界矩阵 View 为 视角矩阵 Projection 为投影矩阵
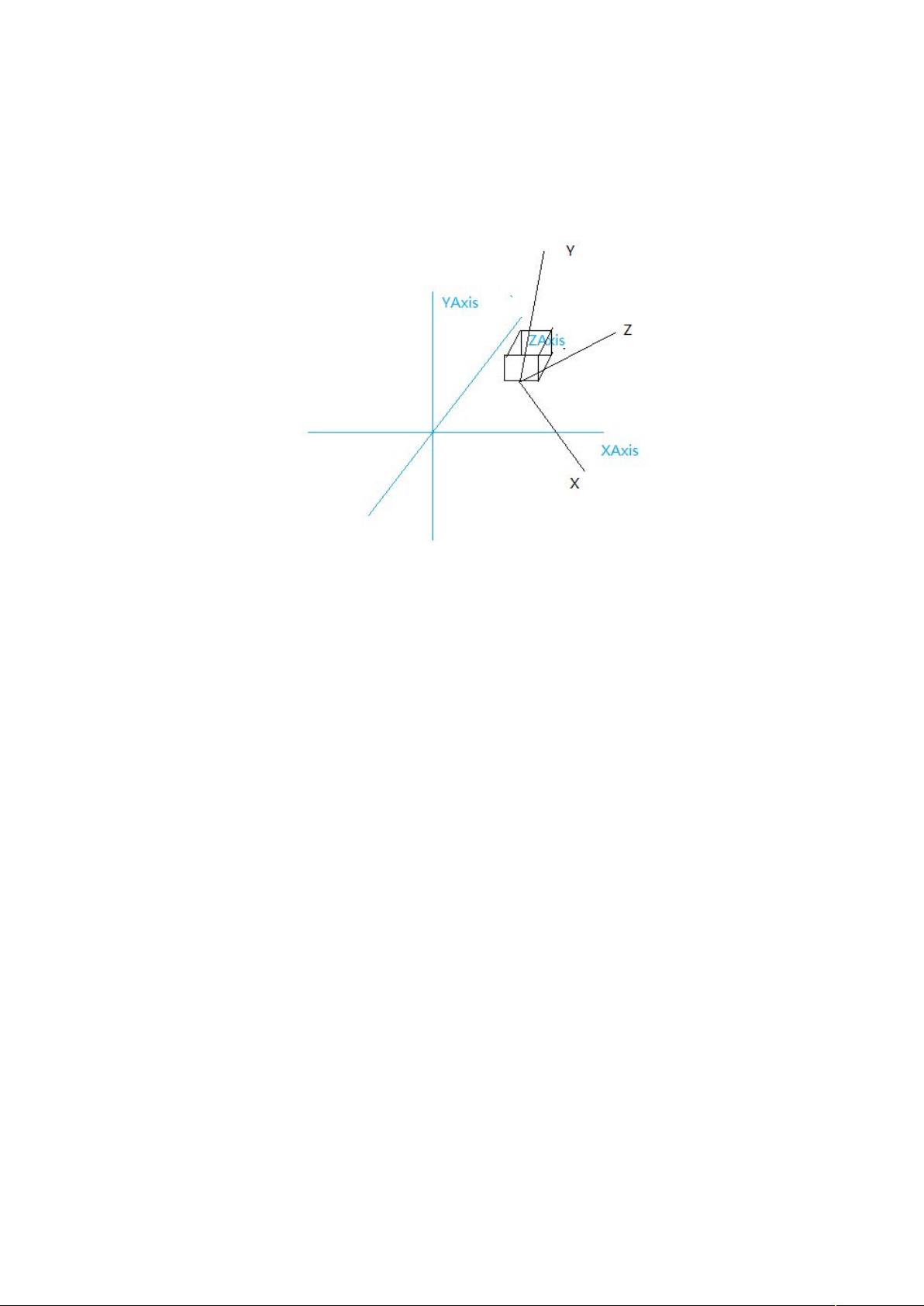
下图为一个模型放在世界坐标系
图一:世界空间
一个立方体放在世界空间中,黑色为世界坐标系。 比如坐标为 (5.0f, 0.0f, 6.0f);
当一个摄像机放在物件的左上方时候,人眼看到的物件的位置就为发生变换。
剩余8页未读,继续阅读
资源评论


mshandle
- 粉丝: 5
- 资源: 3









最新资源
- 汽车制造:ECU软件刷写技术及优化方法提升主机厂生产效率
- stm32f1x必要文件.7z
- 三次贝塞尔最小二乘拟-Cubic Bezier Least Square Fitting
- 基因频率的稳定性和遗传特性在自然选择下仿真
- 一本关于 numpy 矢量化技术的开放获取书籍,Nicolas P. Rougier,2017 年.zip
- Office2021 命令式下载和安装工具
- 多目标流向算法(MOFDA)Multi-Objective Flow Direction Algorithm
- 车载以太网协议及其在AUTOSAR架构中的实现
- 计算机网络分类.docx
- 车载诊断系统中功能安全的设计要求与应对方法
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


