

Adaptive background mixture models for real-time tracking
Chris Stauffer
W.E.L
Grimson
The Artificial Intelligence Laboratory
Massachusetts Institute
of Technology
Cambridge, MA
02139, USA
{stauffer,welg}@ai.mit.edu
http://www.ai.mit.edu/projects/vsam/
Abstract
A
common method
for
real-time segmentation
of
moving regions
in
image sequences involves “back-
ground subtraction,
”
or
thresholding the error between
an estimate
of
the image without moving objects and
the current image. The numerous approaches to this
problem
differ
in
the type
of
background model used
and the procedure used to update the model. This paper
discusses modeling each pixel as a mixture
of
Gaus-
sians and using an on-line approximation to update
the model. The Gaussian distributions
of
the adaptive
mixture model are then evaluated to determine which
ping in the visual field, shadows, lighting changes, ef-
fects of moving elements of the scene (e.g. swaying
trees), slow-moving objects, and objects being intro-
duced
or
removed from the scene. Traditional ap-
proaches based on backgrounding methods typically
fail in these general situations. Our goal is to cre-
ate
a
robust, adaptive tracking system that is flexible
enough to handle variations in lighting, moving scene
clutter, multiple moving objects and other arbitrary
changes to the observed scene. The resulting tracker
is primarily geared towards scene-level video surveil-
lance applications.
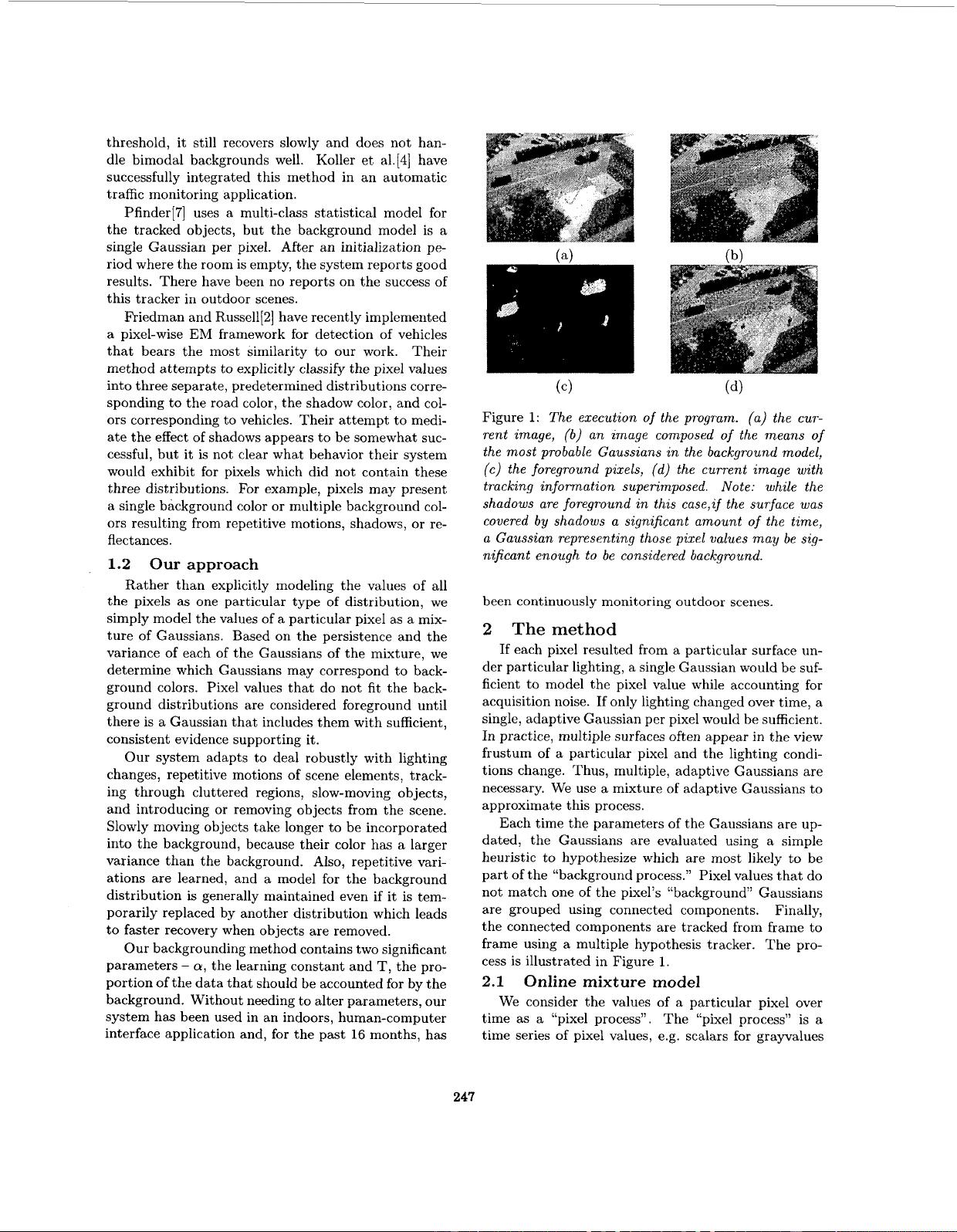
are most likely to result from a background process.
Each pixel is classified based on whether the Gaussian
distribution which represents
it
most effectively is
con-
sidered part
of
the background model.
This results
in
a stable, real-time outdoor tracker
which reliably deals with lighting changes, repetitive
motions from clutter, and long-term scene changes.
This system has been
run
almost continuously
for
16
months,
24
hours a day, through rain and snow.
l.l
previous
work
and
current
shortcorn-
ings
Most
,
researchers have abandoned non-adaptive
methods of backgrounding because of the need for
manual initialization. Without re-initialization, errors
in the background accumulate over time, making this
method useful only in highly-supervised, short-term
tracking applications without significant changes in
the scene.
1
Introduction
In the past, computational barriers have limited the
complexity of real-time video processing applications.
As
a
consequence, most systems were either too slow
to be practical, or succeeded by restricting themselves
to very controlled situations. Recent,ly, faster comput-
ers have enabled researchers to consider more complex,
robust models for real-time analysis of streaming data.
These new methods allow researchers to begin model-
ing real world processes under varying conditions.
Consider the problem of video surveillance and
monitoring.
A
robust system should not depend on
careful placement of cameras. It should also be robust
to whatever is in its visual field or whatever lighting
effects occur. It should be capable of dealing with
movement through cluttered areas, objects overlap-
A
standard method of adaptive backgrounding is
averaging the images over time, creating
a
background
approximation which is similar to the current static
scene except where motion occurs. While this is ef-
fective in situations where objects move continuously
and the background is visible
a
significant portion of
the time, it is not robust to scenes with many mov-
ing objects particularly
if
they move slowly. It also
cannot handle bimodal backgrounds, recovers slowly
when the background is uncovered, and has
a
single,
predetermined threshold for the entire scene.
Changes in scene lighting can cause problems for
many backgrounding methods. Ridder et
a1.[5]
mod-
eled each pixel with
a
Kalman Filter which made their
system more robust to lighting changes in the scene.
While this method does have
a
pixel-wise automatic
246
0-7695-0 I49-4/99 $10.00
0
1999
EEE
Authorized licensed use limited to: NORTHERN JIAOTONG UNIVERSITY. Downloaded on December 23, 2008 at 06:58 from IEEE Xplore. Restrictions apply.
剩余6页未读,继续阅读
资源评论

 michaelsoros2015-06-19比较有实际价值,不愧是MIT的。
michaelsoros2015-06-19比较有实际价值,不愧是MIT的。

lmyanglei
- 粉丝: 1
- 资源: 15









最新资源
- 机械设计液晶面板AOI检测机sw18可编辑全套设计资料100%好用.zip
- 基于扰动观察法 电导增量法的光伏电池最大功率点跟踪仿真模型 (PLECS平台搭建)
- 毕业论文设计 基于单片机的八路扫描式抢答器详细项目实例
- 基于springboot的健身房管理系统源码(java毕业设计完整源码).zip
- 基于SpringBoot的健身房管理系统源码(java毕业设计完整源码+LW).zip
- 4-上市银行常用数据整理(2000-2022年).zip
- mysql数据库JDBC驱动程序.zip
- 机械设计一次性帽子生产设备sw18全套设计资料100%好用.zip
- 基于java的车库智能管理平台开题报告.docx
- 三菱Q PLC案例程序,三菱Q系列程序 QD75MH总线伺服本案例是液晶电视导光板加工,此案例采用三菱Q系列PLC 有QD75MH定位模块SSNET总线伺服,QJ61BT11N 远程主站和远程IO
- 基于java的出租车管理系统开题报告.docx
- 基于SpringBoot的口腔诊所系统的设计与实现源码(java毕业设计完整源码).zip
- 基于java的穿戴搭配系统的开题报告.docx
- Java+Servlet+JSP+Bootstrap+Mysql学生信息管理系统源码+说明(高分项目)
- 基于SpringBoot的哈利波特书影音互动科普网站源码(java毕业设计完整源码+LW).zip
- 基于springboot的图书管理系统源码(java毕业设计完整源码+LW).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


