传感器(camera,lidar,IMU,radar)外参标定及在线标定(源码)-多传感器融合感知.pdf
需积分: 0 124 浏览量
2024-04-30
15:25:48
上传
评论
收藏 1.89MB PDF 举报

1 / 7
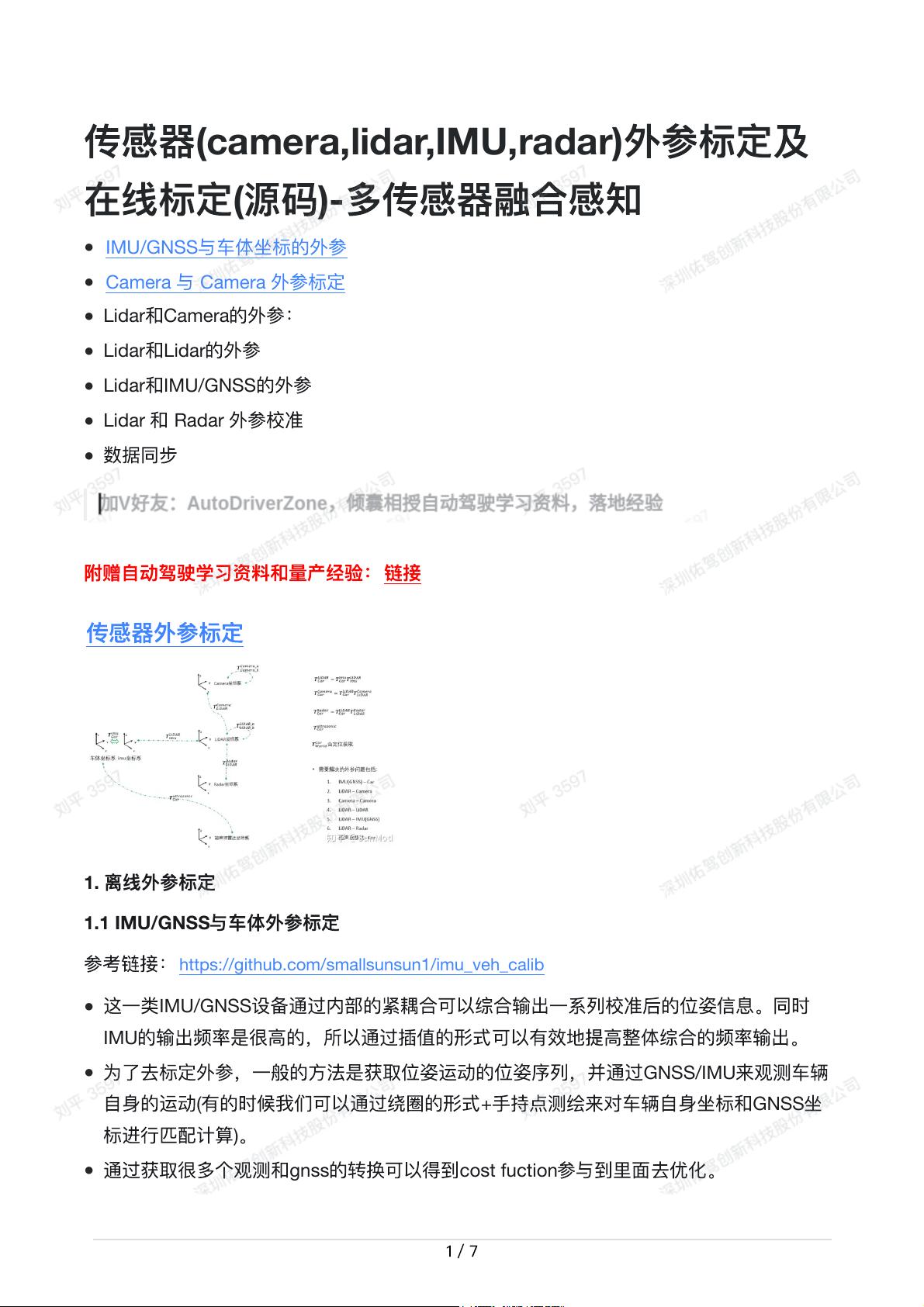
IMU/GNSS
与
⻋
体
坐
标
的
外
参
Camera
与
Camera
外
参
标
定
Lidar
和
Camera
的
外
参
:
Lidar
和
Lidar
的
外
参
Lidar
和
IMU/GNSS
的
外
参
Lidar
和
Radar
外
参
校
准
数据
同
步
附
赠
⾃
动
驾驶
学
习
资
料
和
量
产
经
验
:
链
接
传
感
器
外
参
标
定
1.
离
线
外
参
标
定
1.1IMU/GNSS
与
⻋
体
外
参
标
定
参
考
链
接
:
https://github.com/smallsunsun1/imu_veh_calib
这
⼀
类
IMU/GNSS
设
备
通过
内
部
的
紧
耦
合可
以
综
合
输
出
⼀
系
列
校
准
后
的
位
姿
信
息
。
同
时
IMU
的
输
出
频
率
是
很
⾼
的
,
所
以
通过
插
值
的
形式
可
以
有
效
地
提
⾼
整
体
综
合
的
频
率
输
出
。
为了
去
标
定
外
参
,⼀
般
的
⽅
法
是
获
取
位
姿
运
动
的
位
姿
序
列
,
并
通过
GNSS/IMU
来
观
测
⻋
辆
⾃
身
的
运
动
(
有
的
时
候
我
们
可
以
通过
绕
圈
的
形式
+
⼿持
点
测
绘
来
对
⻋
辆
⾃
身
坐
标
和
GNSS
坐
标
进
⾏
匹
配
计
算
)
。
通过
获
取
很
多
个
观
测
和
gnss
的
转
换
可
以
得
到
cost fuction
参
与
到
⾥
⾯
去
优
化
。
传
感
器
(camera,lidar,IMU,radar)
外
参
标
定
及
在
线
标
定
(
源
码
)-
多
传
感
器
融
合
感
知
●
●
●
●
●
●
●
●
●
●
资源评论













