自主泊车APA的路径规划:经典有效方法.pdf
需积分: 0 92 浏览量
2024-04-11
20:50:01
上传
评论
收藏 4.68MB PDF 举报


1 / 14
附
赠
⾃
动
驾驶
学
习
资
料
和
量
产
经
验
:
链
接
ThefutureofparkingAsurveyonautomatedvaletparkingwith
anoutlookonhighdensityparking
综
述
,
简
要
介
绍
了传
统
的
路
径
规
划
⽅
法
,
如
Hybrid A*, Anytime D*, RRT,
类
似于
Lattice
的
等
。
SamplingBasedVehicleMotionPlanningforAutonomousValet
ParkingwithMovingObstacles
⽂
章
提
到
的
⽅
法
分
为
4
部
分
:
障
碍
物
⻋
辆
轨
迹
预
测
,
可
⾏
驶
区
域
选
择
,
局
部
轨
迹
规
划
,
⻋
辆
控
制
。
预
测
使
⽤
了
Interacting multiple model (IMM) filter
,
输
⼊
⾃
⻋
位
置
、
障
碍
物
⻋
的
heading
angle, velocity, acceleration, yaw-rate
,
输
出
的
intention
分
2
种
:
直
⾏
,
规
避
对
向
来
⻋
(
⾃
⻋
)
。
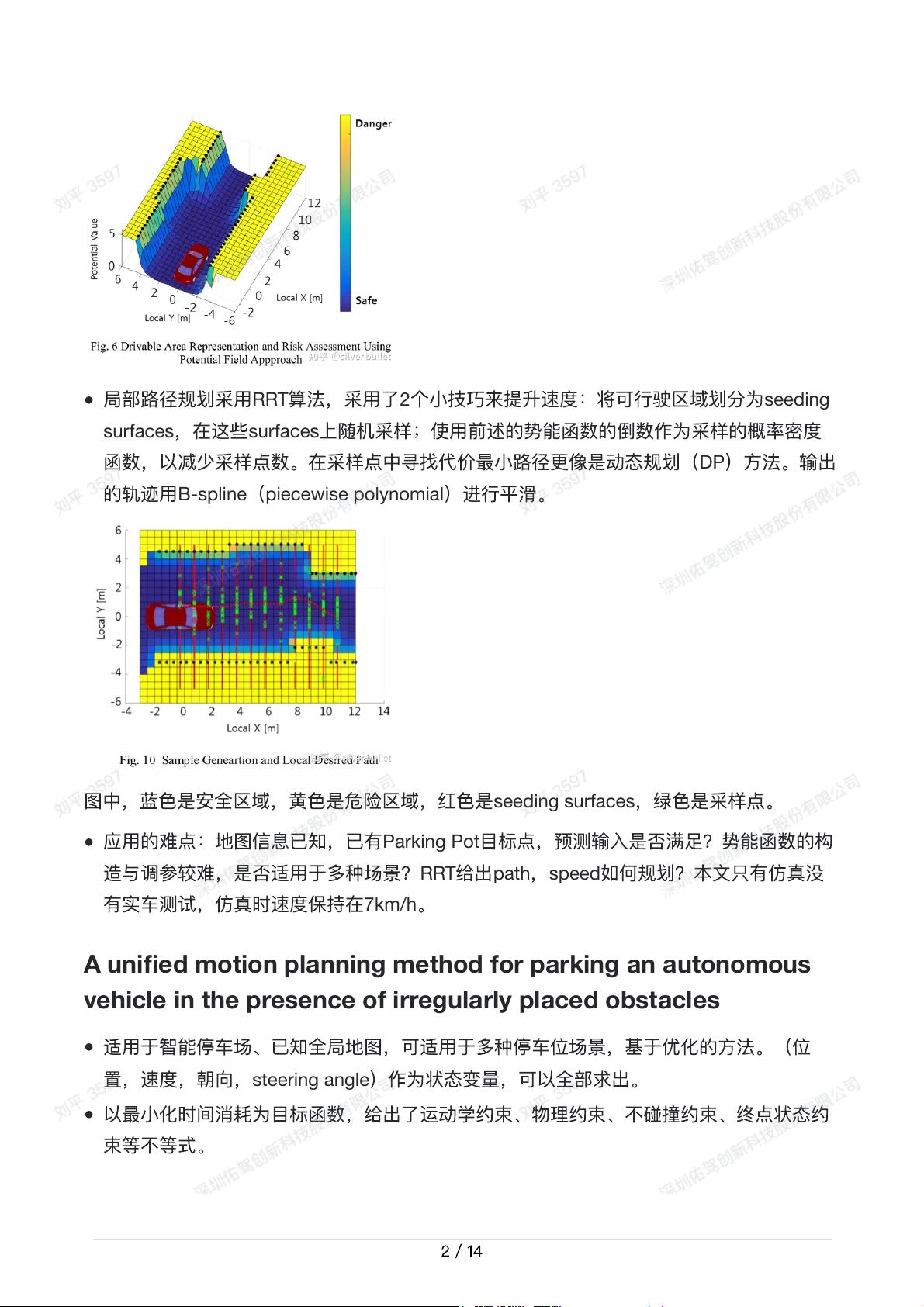
可
⾏
驶
区
域
选
择
采
⽤
势
场
法
,
障
碍
物
预
测
轨
迹
、
道
路
边
沿
、
静
态
障
碍
物
的
位
姿
作为
输
⼊
,
构
造
势
能
函
数
,
以
评
估
危
险
性
以
及
是
否可
⾏
驶
。
⾃
主
泊
⻋
APA
的
路
径
规
划
:
经
典
有
效⽅
法
●
●
●
●
剩余13页未读,继续阅读
资源评论


adsdriver
- 粉丝: 3326
- 资源: 241









最新资源
- GDAL-3.4.3-cp310-cp310-win-amd64.whl
- 基于matlab实现鸡群算法,群体智能算法的一种,立足鸡群的集合特征建立优化过程,与蜂群算法、蛙群算法有相似之处.rar
- 基于matlab实现很好的一个蜂群算法 基于matlab的源程序 从作者那要过来的.rar
- 基于matlab实现多目标优化NSGA3代码.rar
- 基于matlab实现多目标遗传算法(NSGA-III)matlab源代码.rar
- 基于matlab实现多尺度小波分析,用于分析时间多尺度周期
- vscode配置c/c 环境教程
- vscode配置c/c 环境教程
- 基于matlab实现电磁优化计算功能,进行线型规划优化电磁设计.rar
- 基于matlab实现带精英策略的非支配排序遗传算法matlab 源码.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


