
MB9B506 之 GPIO
无可否认,对一个 CPU 还不了解时我们最希望的是它能动起来。
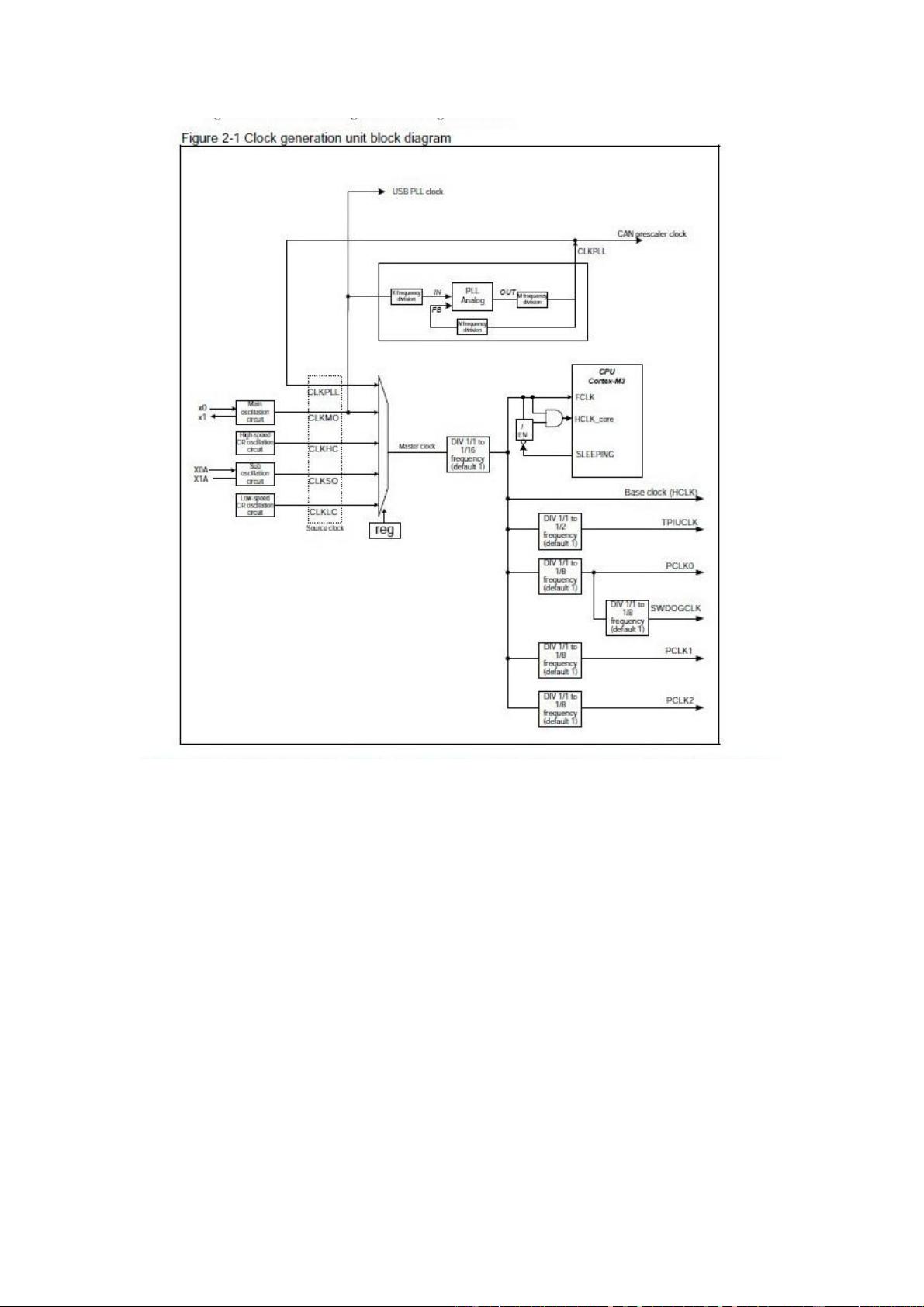
那么我们就从 GPIO 开始吧。虽然晶体的配置,启动等都必须。我们还是先跳过吧。
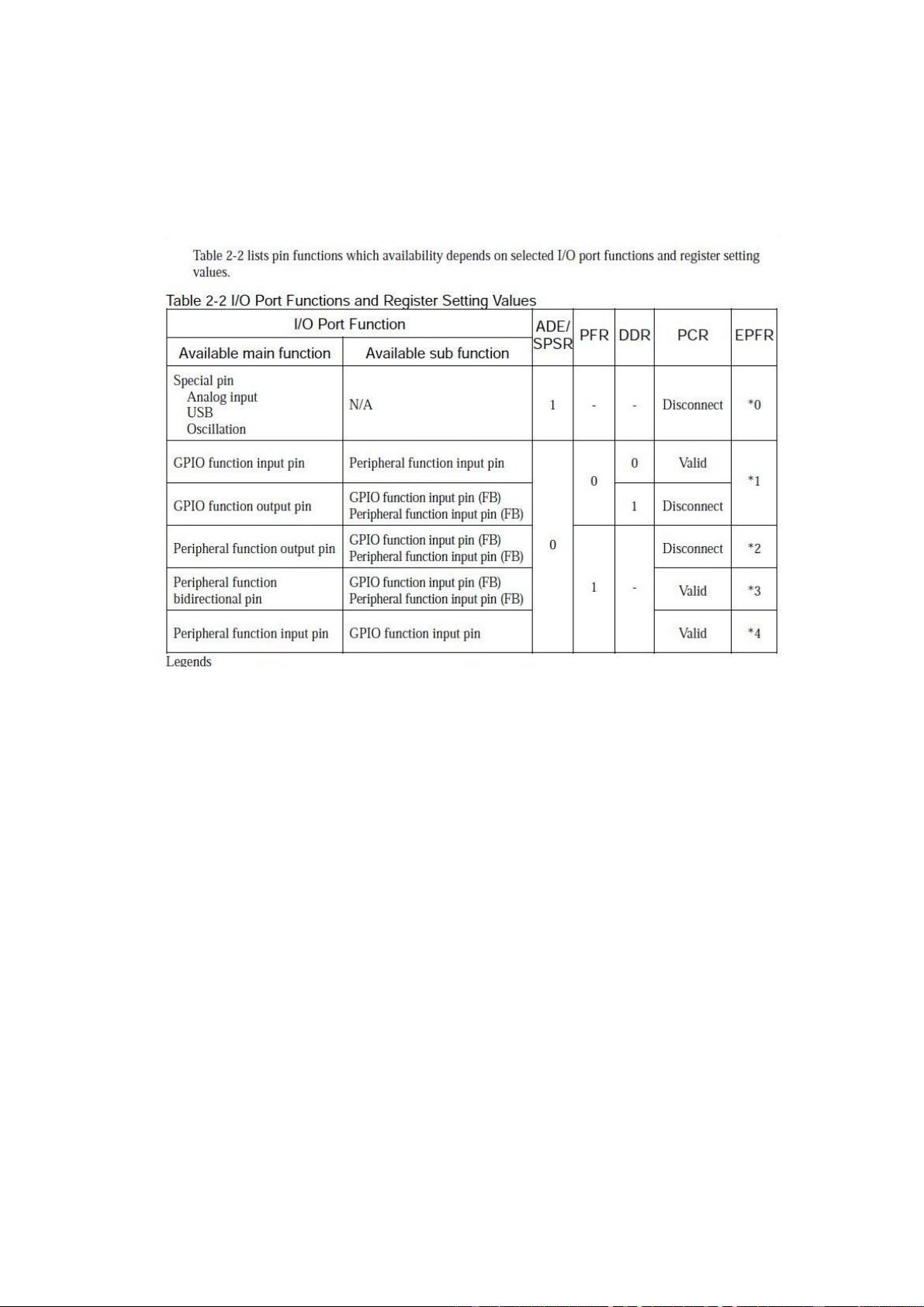
MB9B506 的 GPIO 有以下几个寄存器位来控制,选择是使用哪个功能:
当然还有作为输入输出数据的:PDIR(输入),PDOR(输出)。
这里实际上都只是寄存器的一个位,具体的寄存器应该如此:
比如 PFR: 实际寄存器 FPRX 的一位
PFR 有 PFR0,对应 P0F~P00,PFR1,对应 P1F~P10,…PFR8,对应 P8F~P80,
PFR:GPIO 和设备功能选择。 0:GPIO, 1:设备。
PCRX:为上拉配置位为 1 时选择
ADE 模拟输入允许(为 1 时选择)
SPSR 配置相关腿位 USB 或晶体腿脚或不是。为 1 时选择。
DDR 输入输出方向设置 0为输入,1 为输出。
EPFR 扩展腿功能选择配置位。这个寄存器每个腿对应一个寄存器的多位(不是一位哦)这
种寄存器高达 11 个之多。
下面就以一个小例子作为结束吧。
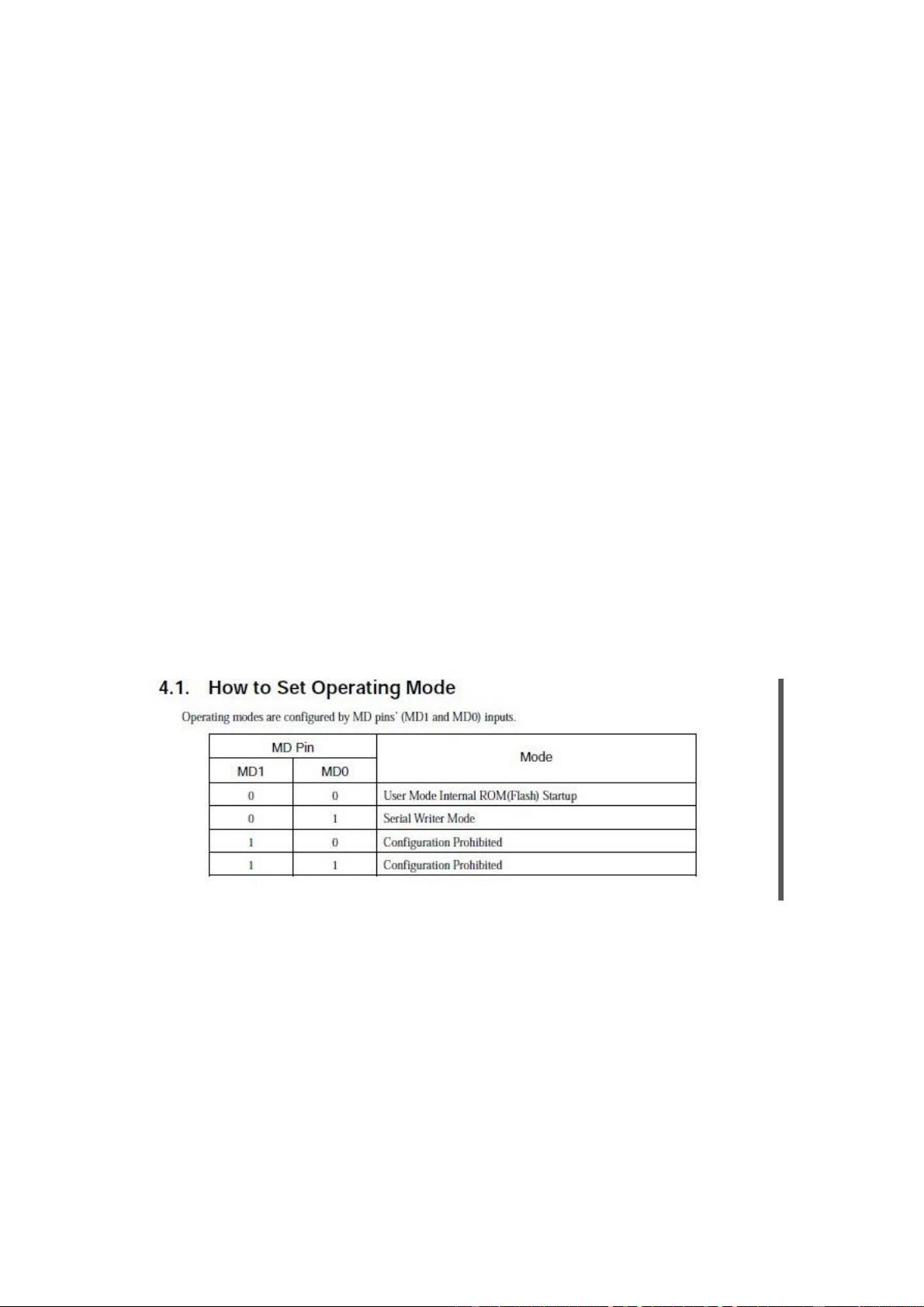
例子:MB9B500 开机启动后一般默认为 GPIO 输入(除了 JTAG 和时钟外)。
如 果要点亮 Led 只要把 DDR 设置位 1 就可以送数据 1 或 0 到 PDOR 熄灭或点亮 LED 了(当
然要连接好电路)。
这个 LCDIO 初始化就用到了 IO 的配置:
void Init_LCD_IO()
{
/* Release the analog input function*/
ADE =0x03; //不选 ADC(估计这个 IO 有 ADC 功能)
/*Select CPIO function*/
剩余45页未读,继续阅读
资源评论


O蛋定哥O
- 粉丝: 1
- 资源: 5









最新资源
- 音创点歌机刷机文件 可以插卡刷
- DDR3 verilog 代码,包含项目以及测试testbench,包括数字部分以及ddrphy
- 圣诞树HTML代码(简洁版)
- Hi3403V100(SS928V100)-PINOUT-CN.xlsx
- 数值代数实验报告——科创2402奚昱平.docx
- 使用python计算二叉树深度的递归算法示例.zip
- MATLAB基于领航追随法的车辆编队控制,领航追随者与人工势场法的简单融合实现避障
- UnrealSharp插件,UE(虚幻)学习(二) 使用UnrealSharp插件让UE支持C#脚本
- 中国人口空间分布公里网格数据集【最新更新!!!】
- 基于java+springboot+mysql+微信小程序的个人健康信息管理小程序 源码+数据库(高分毕业设计).zip
- 基于java+springboot+mysql+微信小程序的点餐系统 源码+数据库(高分毕业设计).zip
- 基于java+springboot+mysql+微信小程序的高校餐厅食品留样管理系统 源码+数据库(高分毕业设计).zip
- PyAudio-0.2.9-cp33-none-win32.whl
- mmexport1735285860463.png
- stm32 Hal库双缓冲接收串口数据
- 基于java+springboot+mysql+微信小程序的宿舍管理小程序 源码+数据库(高分毕业设计).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


