


Generated by Unregistered Batch DOC TO PDF Converter 2010.2.301.1358, please register!
1
“三星视界杯”第七届智能控制设计大赛之高级组 A 题
网格迷宫小车
队名 : 桂林马
专业 : 自动化
队长 : xxx
队员 : xxx
队员 : xxx
提交日期:2012 年5 月25 日

Generated by Unregistered Batch DOC TO PDF Converter 2010.2.301.1358, please register!
2
【摘要】
智能小车是大学阶段一个重要的学习、制作内容。本系统是基于 nRF24L01
无线模块通信,以 stm32 开发板为基础的智能网格迷宫小车。该小车通过 L298
模块驱动轮子转动,利用 9 个红外实现巡线,分岔路判断,终点判断功能。小车
通过 2 个码盘和 2 个红外对管利用读回的脉冲数实现小车行走距离的测量,并与
定时器配合实现测速功能。小车通过无线模块和串口与上位机进行通信,实时回
传 9 个巡线对管的信息和小车位置,迷宫地形。本系统具有交互性能良好的人机
操作界面,可靠地与小车进行通信。我们还可以通过电脑键盘控制小车往 8 个方
向的行走。
本迷宫小车实用性强,安全可靠性高,价格低廉,简单易用,有较好的性能。
【关键词】迷宫 无线通信 红外巡线 上位机
Abstract:
Intelligent car is an important stage of university learning, production content.
This system is based on nRF24L01 wireless communication module, to stm32
development board of intelligent grid based maze car. The car through the L298
module drive wheels turning, use of nine infrared realize willess, points at the
judgment, the judge function. The car through the two yards plate and two to the
use of infrared read back the number of pulses walking distance measurement
realize the car, and with timer function realization with speed. The car through the
wireless module and serial interface communication and the upper machine,
real-time willess nine to the back of the information and the car position, a maze
terrain. This system has the interactive the good performance of the man-machine
operation interface, reliable communication with the car. We can also through the
computer keyboard control the car to eight of the direction of walking.
This labyrinth car practical strong, safety reliability is high, the price is cheap,
simple to use, and have a good performance.
Keywords: maze wireless communication Infrared found line PC
Generated by Unregistered Batch DOC TO PDF Converter 2010.2.301.1358, please register!
3
目录
摘要..................................................2
Abstract..................................................2
第一部分 方案比较.....................................5
1.1系统总体设计与分析.....................................5
1.1.1 硬件部分.....................................................5
1.1.2 软件部分...................... ..............................5
1.2各个硬件部分方案的设计与分析...............................6
1.2.1巡线模块的方案比较............................................6
1.2.2码盘测速模块的方案比较........................................6
1.2.3电机与减速箱的方案比较........................................6
1.2.4电机驱动模块的方案比较........................................7
1.2.5无线通信模块的方案比较........................................7
1.2.6路径显示的方案比较............................................8
1.2.7遥控功能的方案比较............................................8
1.2.8算法的比较和选择..............................................8
第二部分 设计与论证...........................................9
2.1 硬件设计.....................................................9
2.1.1 红外对管巡线模块.............................................9
2.1.2 码盘测速模块................................................10
2.1.3 L298电机驱动模块............................................10
2.1.4 nRF24L01无线通信模块........................................11
2.1.5 稳压源模块..................................................11
2.2 软件设计.............................................12
2.2.1 电机驱动功能的设计..........................................12
2.2.2 巡线功能的设计..............................................13
2.2.3 测速功能设计................................................14
2.2.4 nRF24L01无线通信功能设计....................................14
2.2.5 上位机设计..................................................17
2.2.6 遥控功能设计................................................19
2.3 算法设计.............................................21
2.3.1 地图在内存中的模型的建立....................................22
2.3.2 地图搜索算法的设计..........................................25
2.3.3 最优路径算法的设计..........................................26
Generated by Unregistered Batch DOC TO PDF Converter 2010.2.301.1358, please register!
4
2.3.4 搜索算法和最优路径算法的实现...............................26
第三部分 理论分析与计算................................33
3.1 红外对管巡线模块.....................................33
3.2 码盘测速模块.........................................34
3.3 L298电机驱动块.......................................36
3.4 nRF24L01无线通信模块.................................36
3.5 稳压源模块...........................................37
第四部分 安装调试与性能测量..........................38
4.1 电路安装与电路调试.........................................38
第五部分 设计总结....................................39
附录一 参考文献...................................................40
附录二 系统源代码.................................................40
Generated by Unregistered Batch DOC TO PDF Converter 2010.2.301.1358, please register!
5
第一部分 方案比较
1.1系统总体设计与分析
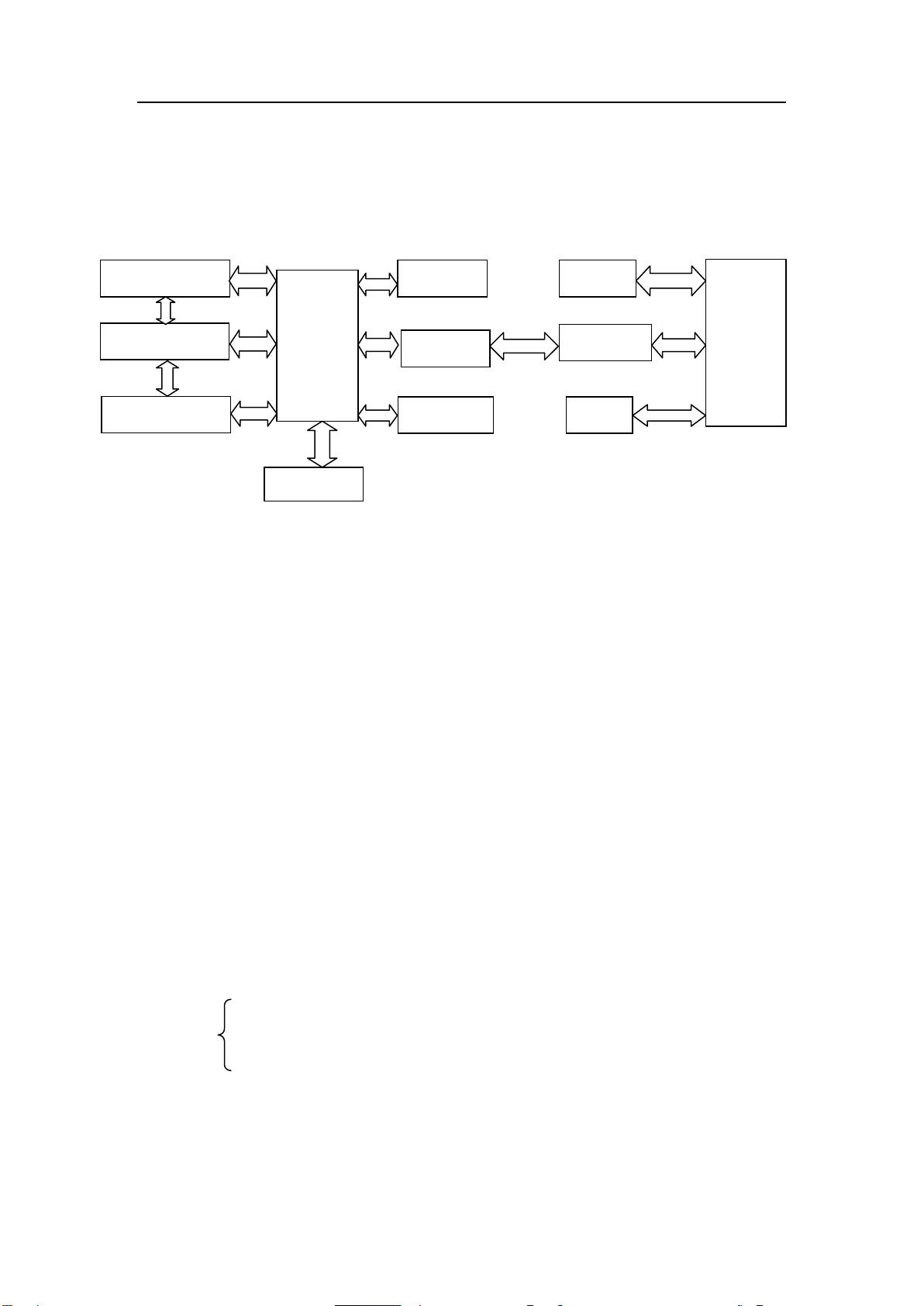
1.1.1 硬件部分
硬件部分的设计如下图所示:
各个模块主要实现的功能:
stm32单片机:作为控制单元,实现数据的处理,数据的存储。配合各模块实现
系统的总体功能。
电机驱动模块:为电机提供合适电压,受单片机控制。
直流减速电机:带动车轮,使小车前进和后退。
红外测距模块:利用红外对管配合码盘通过读脉冲的方式实现小车距离的测量。
电源模块:利用5节1.5V电池串联,通过LM317稳压模块,为系统提供电源。
无线模块:通过两个无线模块之间的通信,实现上位机和小车的通信。
寻光模块:利用红外对管和电压比较器组成,能够实现追寻光源的功能。
上位机:用于显示路径和小车当前位置和速度,显示小车的位置信息
遥控:通过计算机的键盘实现小车往8个方向的行走。
巡线模块:通过9个红外对管实现路面信息的读取。
1.1.2 软件部分
巡线
巡线模式 显示信息
显示最优路径
遥控模式:电脑键盘控制
寻光模式:自动走向光源
STM32
单片机
电源模块
电机驱动模块
直流减速电机
红外测距模块
无线模块
寻光模块
STM32
单片机
无线模块
上位机
遥控
巡线模块






评论3
最新资源