



摘 要
本设计利用粒子群算法及改进的粒子群算法研究含分数阶被动悬架参数的优化
设计。首先,本设计分析研究背景及国内研究现状,引入车身垂向加速度、悬架动挠
度、轮胎动载荷和电机垂向加速度四个评价指标,建立三自由度含分数阶轮毂电机悬
架动力学模型,分析作为系统输入的路面激励模型,选取 D 级路面进行了时域仿真
分析和功率谱密度分析;然后,介绍粒子群算法的相关背景,并应用其对悬架参数进
行了优化,得出各个性能指标下的时域仿真图,并对优化前和优化后的均方根值进行
比较,分析发现 PSO 算法易陷入早熟和局部极值;最后引入交叉变异算子,对 PSO
算法进行改进,分析发现基于改进的 PSO 算法得到的新的悬架参数不仅使乘坐舒适
性得到改善,还改善操纵稳定性,而相应算法的搜索效率和收敛速度也得到提高,具
有很好的实际意义。
关键词:汽车悬架;粒子群算法;参数优化;平顺性;交叉变异

目 录
第 1 章 绪论 ......................................................................................................................1
1.1 引言 ......................................................................................................................1
1.2 平顺性研究意义 ..................................................................................................2
1.3 悬架参数优化方法研究现状 ..............................................................................2
第 2 章 评价指标及模型建立 ..........................................................................................3
2.1 车辆平顺性评价指标 ..........................................................................................3
2.2 轮毂电机车辆动力学模型 ..................................................................................4
2.2.1 分数阶的引入 ...............................................................................................4
2.2.2 基本假设条件 ...............................................................................................5
2.2.3 含分数阶的非线性模型 ...............................................................................5
2.2.4 含分数阶的悬架非线性仿真模型 ...............................................................7
2.3 路面输入模型 ......................................................................................................8
2.3.1 路面不平度 ...................................................................................................8
2.3.2 路面激励时域模型 .......................................................................................8
2.4 非簧载质量增加仿真分析 ................................................................................10
第 3 章 基于粒子群算法的悬架参数优化 ....................................................................12
3.1 引言 ....................................................................................................................12
3.2 粒子群算法简介 ................................................................................................12
3.3 粒子群算法原理分析 ........................................................................................12
3.4 算法流程 ............................................................................................................14
3.5 参数选取 ............................................................................................................14
3.5.1 惯性权重参数 .............................................................................................14
3.5.2 认知系数与社会系数 .................................................................................15
3.5.3 其他相关参数调整 .....................................................................................16
3.6 基于粒子群算法的参数优化 ............................................................................16
3.6.1 悬架参数的优化变量 .................................................................................16
3.6.2 优化变量的约束条件 .................................................................................16
3.6.3 确定待优化的目标函数 .............................................................................17
3.6.4 优化结果 .....................................................................................................18
3.7 粒子群算法优缺点 ............................................................................................21
3.7.1 优点 .............................................................................................................21

3.7.2 缺点 .............................................................................................................21
第 4 章 基于交叉变异改进粒子群算法的悬架参数优化 ............................................22
4.1 粒子群算法缺点原因分析 ................................................................................22
4.2 引入交叉、变异算子 ........................................................................................22
4.3 结合交叉变异改进后的本设计算法流程 ........................................................23
4.4 优化结果 ............................................................................................................24
4.5 改进前后结果对比 ............................................................................................25
第 5 章 总结与展望 ........................................................................................................26
5.1 总结 ....................................................................................................................26
5.2 建议与展望 ........................................................................................................26
参考文献 ............................................................................................................................27
致谢 ....................................................................................................................................28
附录 ....................................................................................................................................29
1
第1章 绪论
1.1 引言
现如今,汽车早已十分普遍,然而燃油汽车因为其尾气中含大量诸如一氧化碳、
碳氢化合物的污染物,而给大气、给环境带来了极其恶劣的影响。随着人们环境保护
意识的提高,各个国家加大了对新能源汽车的研发力度。作为典型的新能源汽车,电
动汽车因其如下优点而备受重视:
(1) 无污染、零排放、噪声小。由于电动汽车不含内燃机,车辆行驶时不会产生
有毒有害气体,从而不会造成环境污染。且无需动力传动系统,不会如一般汽车一样
产生过大噪声。
(2) 相较于燃油汽车,电动汽车后续使用过程中较为经济,一是可以积聚能量加
以使用,二是利用夜间充电减少开销。
(3) 安全系数高、易保养、维修方便。由于无需消耗燃油,相对于传统燃油车,
电动汽车发生火灾的概率大大降低。
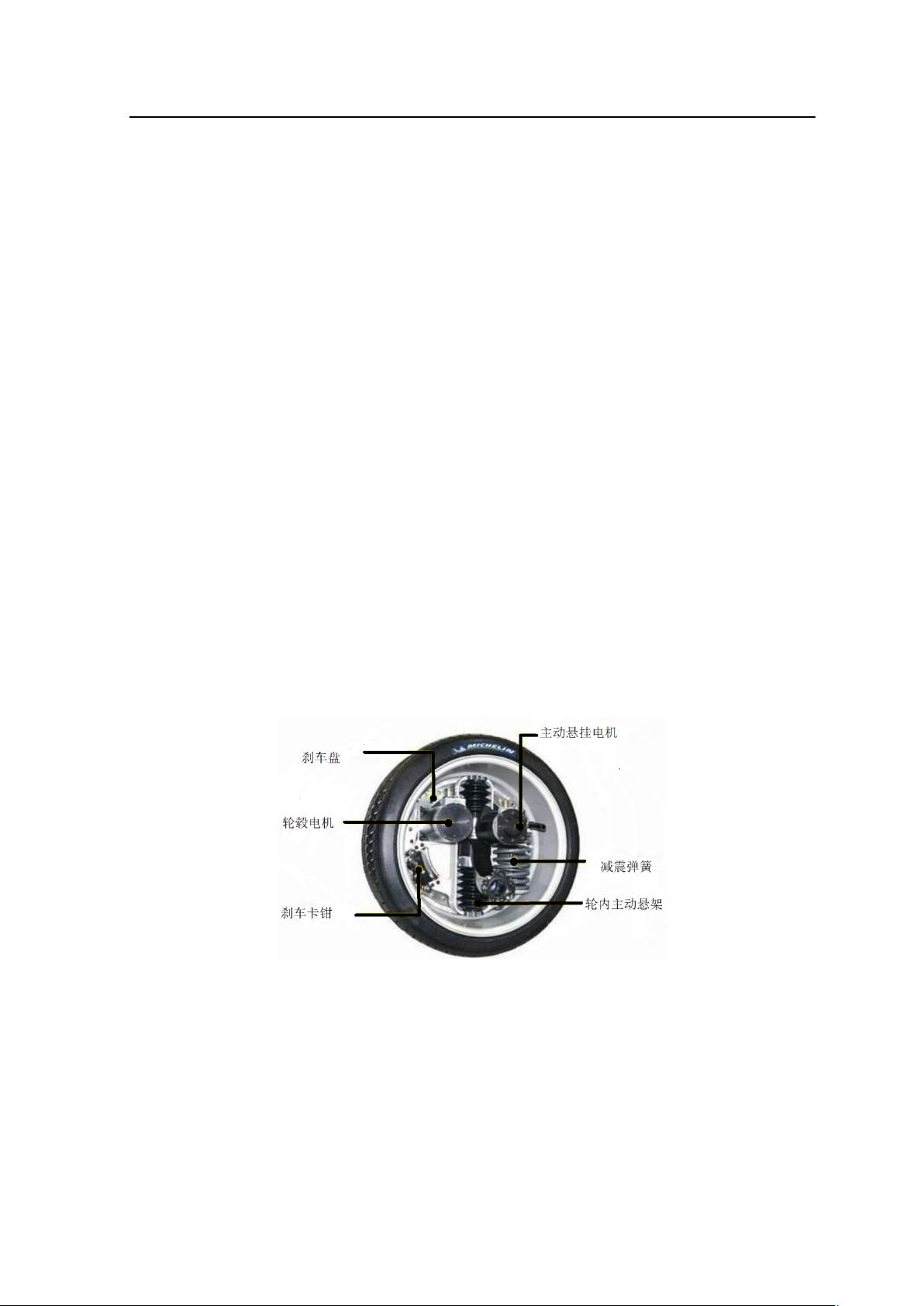
作为电动汽车的主要发展方向之一,含轮毂电机的该类车型因为将电机置于轮毂
之中使得车内部的空间可以得到更进一步的利用,其典型结构见图 1-1。
图 1-1 轮毂电机结构图
根据相关文献,非簧载质量与汽车平顺性呈负相关,非簧载质量的增加会恶化汽
车平顺性,相对于一般车辆,由于轮毂电机位于悬架以下,加设有轮毂电机的车辆会
表现出以下不良现象:
(1) 当车辆在在不平路面下行驶时,车轮部分的振动会加大,从而使得汽车平顺
性大大降低,恶化乘员的乘车舒适性。
(2) 轮胎动载荷也会由于非簧载质量的增加而增加,而与之相关的操作稳定性则

2
会受到影响,大大降低,表现为降低了车轮与路面接触的可靠性以及轮胎的接地性。
1.2 平顺性研究意义
汽车的平顺性即保持汽车在行驶过程中产生的振动和冲击环境对乘员舒适性的
影响在某一个限定范围之内
[1]
。由于路面凹凸不平、路面坑洼的存在,以及汽车内部
构件在汽车行驶过程中的不同幅度的振动,各种外部、内部的输入都会激发导致车辆
的振动。
汽车的行驶平顺性直接影响乘员的乘车体验,且对车辆各部件的寿命也有着显著
影响。当平顺性较差时,长期处于颠簸状态下的车辆会给驾驶人员带来极坏的操作体
验,影响其正常驾驶,降低车辆正常操控性。而长期的颤动也会增大汽车各部件的摩
擦,缩短其使用寿命,影响车辆的动力性、制动性,降低汽车的安全性能。因此,保
证车辆的振动处于合理范围内具有重要的意义。而根据前文分析可知,轮毂电机的使
用会影响车辆平顺性,因此如何优化悬架参数降低轮毂电机的不良影响是本设计的研
究重点。
1.3 悬架参数优化方法研究现状
长安大学的古玉锋等通过建立多体动力学模型结合拓扑结构图对悬架参数进行
了优化
[2]
; 西安理工大学的庞辉等采取改进的多目标自适应遗传算法来优化车辆空
气悬架参数
[3]
; 对于非线性的整车悬架优化问题,湖南大学的蔡杨等首先利用最小
二乘法得出近似模型后采取遗传算法来提高汽车平顺性
[4]
; 来自吉林大学的麻凯等
结合摄动理论和广义逆理论直接分析了参数选取问题
[5]
。张海涛、王爱国等基于局
部精英策略改进了人工蜂群算法(ABC)来对悬架相关参数进行了优化,提高了搜索能
力以及搜索效率
[6]
,长安大学的吕彭民等采用同一目标函数法对所建立的多目标悬架
模型进行了参数优化
[7]
,河北工程大学的董玉振等基于灰色编码改进了遗传算法来进
行参数优化,极大地提高了收敛速度
[8]
。基于最优控制理论,潘国建、刘献栋应用最
小二乘法进行了参数优化,改善了悬架系统的动态性能
[9]
。













