63
2020
年第
3
期 科技智囊
摘 要:
连续波体制雷达的发射功率可在一段时间内实现功率平均分配,发射峰值功率小、环境适应性
强,因此易于结构优化、电路简单。文章在 STM32 架构上设计了一款 24GHz 毫米波调频连续波(frequency
modulation continuous wave,FMCW)雷达系统。经 LabView 平台仿真和实物验证,最终可生成频率为
100Hz,峰值为 2.56V 的调频连续波。该系统由于易实现、效率高,可在自适应巡航和交通监管等方向
开展应用。
关键词:
调频连续波;差频信号;测距雷达;STM32 单片机;
中图分类号:TN95
文献标识码:
A
A Design of FMCW Radar System Based on STM32 System
Ren Jian Ding Xu Guo Guofa Zhao Dong
(Shenyang University of Technology,Liaoning,Shenyang ,110870)
Abstract:The transmission power of the continuous wave radar can realize the average power distribution within a
period of time,the transmission peak power is small,and the environmental adaptability is strong,so it is easy to
optimize the structure and the circuit is simple.This paper designs a 24GHz millimeter wave frequency modulation
continuous wave (FMCW) radar system on the STM32 architecture.Through LabView platform simulation and
physical verication,it can nally generate a frequency-modulated continuous wave with a frequency of 100Hz and
a peak-to-peak value of 2.56V. Due to its easy implementation and high efciency,this system can be applied in
adaptive cruise and trafc supervision.
Key words: FM continuous wave; Difference frequency signal; Ranging radar; STM32 microcontroller;
一种基于 STM32 系统的
FMCW 雷达系统设计
任建 丁旭 郭国发 赵冬
(沈阳工业大学信息科学与工程学院,辽宁,沈阳, 110870)
作者简介:任建,女,1981 年生,工学博士,讲师,研究方向:微波测量。
一、引言
FMCW 雷达是基于连续波雷达技术而来的,与脉冲
体制雷达相比,它具有高带宽、工作电压低、大时带
积等优点
[1-3]
。随着集成电路工艺的不断提高,硬件成
本降低,高性能的毫米波雷达研制成为可能
[4-6]
。
2017 年南京理工大学的李健以 TMS320C6748 核心
板来搭建雷达平台
[7]
。2018 年 11 月 1 日, 国 内 首 辆
配备毫米波雷达的自动驾驶出租车正式问世。由于高
频器件较贵,鲜有电子厂商在这个领域有重大突破。
国内雷达传感器开发难度大
[8]
。笔者所设计的基于
FMCW 雷达系统是一款简单高精度的雷达系统,可以为
大规模生产提供帮助。
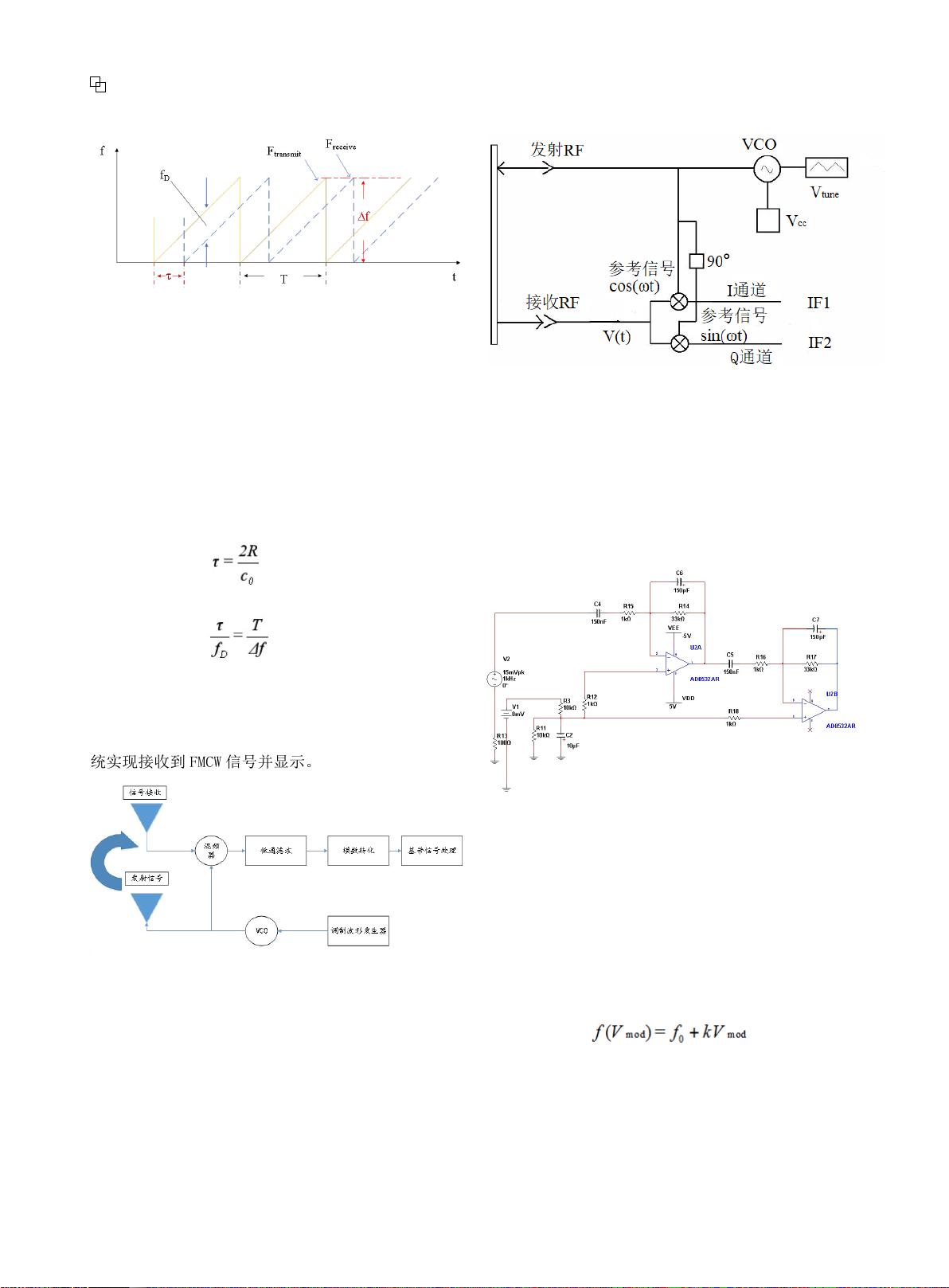
二、FMCW 雷达测距基本原理
连续波雷达发射信号有非调制、多频和调频三种。
调频连续波雷达测距性能较好。调频连续波雷达的主
流工作频段是 24GHz、77GHz,目前 24GHz 调频连续波
雷达是大多数厂家的主流选择。
发射信号在传播过程中遇到障碍物发生散射,
散射信号向所有方向传播,部分信号被接收天线接
收。发射到接收有时间上的延时,回波信号相对于
本振信号有频率差,分析频率值可得目标物体的距
离信息
[9-12]
。
技术研发与应用