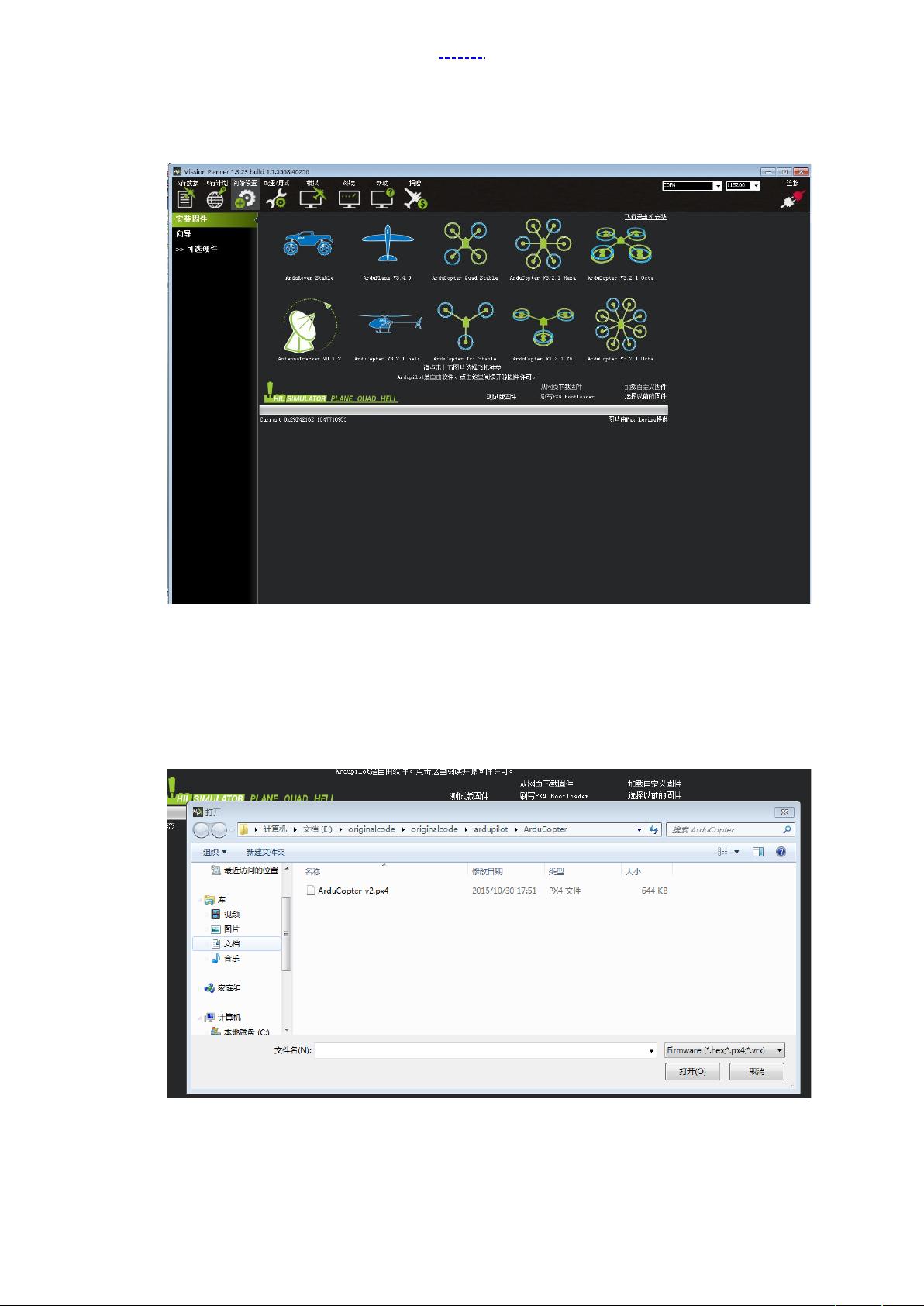
使用软件MissionPlanner对飞控进行配置地过程.doc
版权申诉
189 浏览量
2021-11-19
20:05:08
上传
评论
收藏 1.91MB DOC 举报

资源评论


ldl102533
- 粉丝: 0
- 资源: 5万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- K-means算法的数据集
- protoc-gen-go
- 编程项目实战:基于BS架构和asp.net技术的图书销售管理系统的设计与实现(源代码+论文)
- 研究生数学建模比赛-航班登机口分配全套代码源码
- PHP学习资料,学习示例源码.rar
- 基于Java+Mysql的 SSM+Maven 超市进销存管理系统课程设计
- 毕设项目:基于BS的图书销售管理系统的设计与实现(asp.net+源代码+论文)
- 基于C语言写的潮流计算大作业(95分以上)
- mysql的运用,增删改查以及索引等
- 一个基本的Shell脚本示例,用于监控内存使用情况,并在内存占用超过80%时发送警告 重启应用的部分需要你根据实际情况进行调整:
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


