range-free localization beyond connectivity
需积分: 0 123 浏览量
2009-11-18
10:42:21
上传
评论
收藏 4.88MB PDF 举报


Achieving Range-Free Localization Beyond Connectivity
Ziguo Zhong
Department of Computer Science
University of Minnesota
zhong@cs.umn.edu
Tian He
Department of Computer Science
University of Minnesota
tianhe@cs.umn.edu
Abstract
Wireless sensor networks have been proposed for many
location-dependent applications. In such applications, the re-
quirement of low system cost prohibits many range-based meth-
ods for sensor node localization; on the other hand, range-free
localization that d e pend only on connectivity may underutilize
the proximity information embedded in ne ighborhood sensing.
In resp onse to the above limitatio ns, th is paper pr esents a novel
range-free appro ach to c apturing a relative distance between 1-
hop neighboring nodes from their neighborhood orderings that
serve as unique high-dimensional location signatures for nodes
in the network. With little additional overhead, the de sig n in
this p a per can b e conveniently applied as a transparent support-
ing layer for many state-of-the- art connectivity-based outdoor
sensor node loca liza tion solutions to achieve better positioning
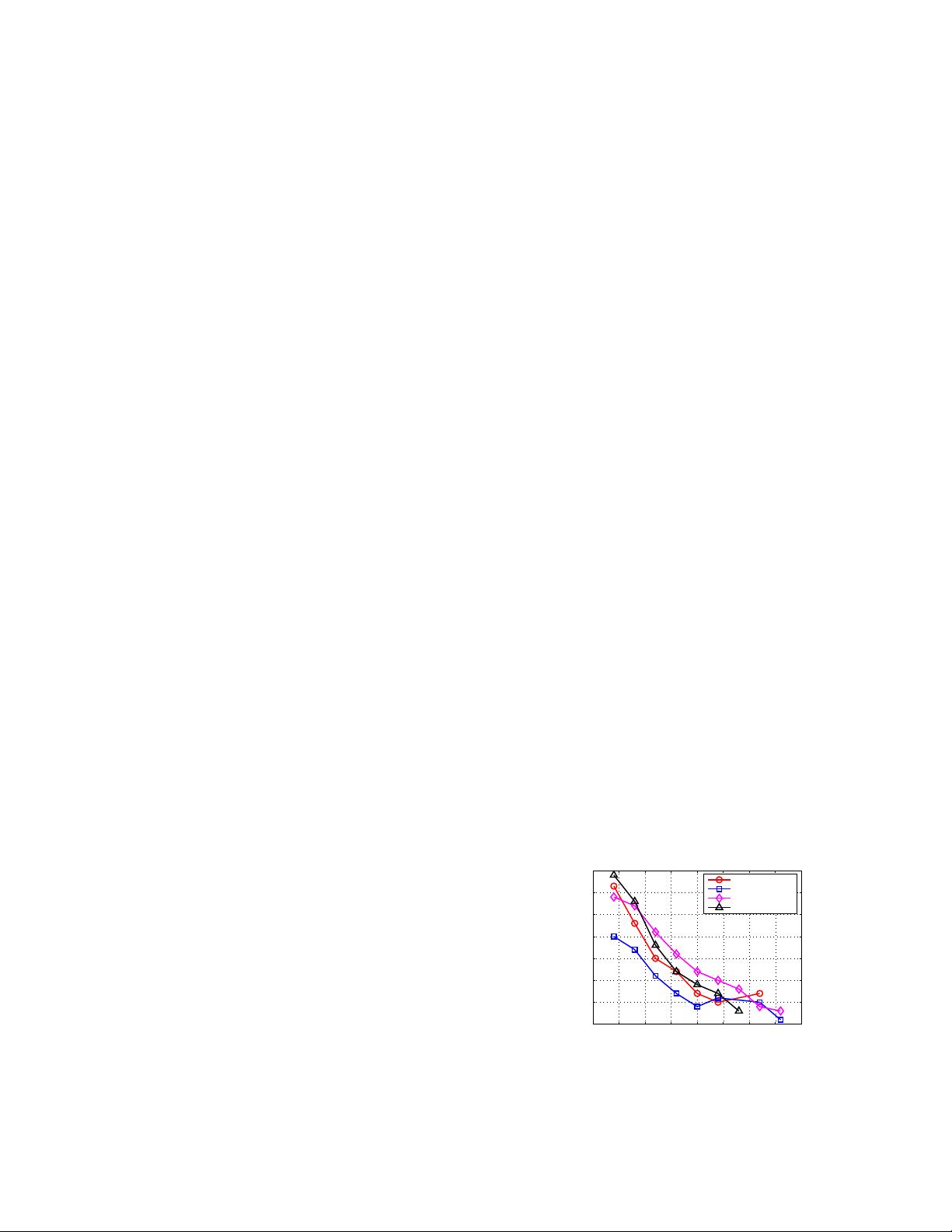
accuracy than c onnectivity alone. We implemen ted our design
with three well-known localization algorithms and tested it in
two types of outdoor test-bed experiments: an 850- foot-long lin-
ear network composed of 54 MICAz motes, and a regular 2D
network covering an area of 10000 square feet with 49 motes.
System evaluation results show considerable performance gains
from the proposed design, which helps eliminate estimation am-
biguity with sub-hop resolution, and reduces localization errors
by as much as 3 5%. In addition, extensive simulations reveal an
interesting feature of robustness for our design under unevenly
distributed radio propagation path loss, and confirm its effec-
tiveness for large-scale outdoor networks.
Categories and Subject Descriptor s
C.2.4 [Computer Communication Networks]: Distributed
systems
General Terms
Algorithms, Design, Performa nce, Exper imentation
Keywords
Wireless Sensor Networks, Localization, Neighborhood Or-
dering, Regulated Signature Distance (RSD)
Permission to make digital or hard copies of all or part of this work for personal or
classroom use is granted without fee provided that copies are not made or distributed
for profit or commercial advantage and that copies bear this notice and the full citation
on the first page. To copy otherwise, to republish, to post on servers or to redistribute
to lists, requires prior specific permission and/or a fee.
SenSys’09,
November 4–6, 2009, Berkeley, CA, USA.
Copyright 2009 ACM 978-1-60558-748-6 ...$5.00
1 Introduction
Wireless sensor networks (WSN) have been considered as a
promising tool for many location-de pendent applications [ 1, 2],
e.g., battlefield surveillance [3], e nvironment data collection [4],
event or human localization [5, 6]. In addition, some of the r out-
ing protocols [7, 8] and network management mechanisms pro-
posed for such networks are built on the assumption that geo-
graphic param eters of each sensor node are available. Although
sensor node localization plays an important r ole in all such sys-
tems, it is itself a challenging problem due to extremely limited
resources available at each low-cost and tiny sensor nod e .
Many excellent ideas have been proposed for node localiza-
tion in WSN. Based on whether accura te ranging is required,
there are basically two types of methods: (i) range-based loc al-
ization and (ii) range-free localizatio n. Range-based localiza-
tion could achieve good accuracy but is costly, requiring either
per-node ranging hardware [10, 12, 14, 16, 22] or careful sys-
tem calibration and environment pro filing [9, 11, 40], and thus is
not appr opriate for large-scale outdoor sensor networks. Range-
free approac hes localize nodes based on simple sensing, such
as wireless connectivity [26, 27, 29, 32, 33], anchor proxim-
ity [25, 28, 30], or localization events detec tion [36, 37]. Amo ng
these, connectivity-based solutions featu re a low overall system
cost, but by sacrificing localization a ccuracy.
Our work is motivated by the finding that localization by
means of mere connectivity may underutilize the proximity in-
formation available from n e ighborhood sensing. Although ra-
dio signal strength (RSS) is no t consid ered a good choice for
physical distance estimation in many scenario s because of un-
known radio path loss factors, mu lti-path effects, hardware dis-
crepancies, antenna orientation, and so forth [40, 41, 42], it
does provide some useful distance-related information beyond
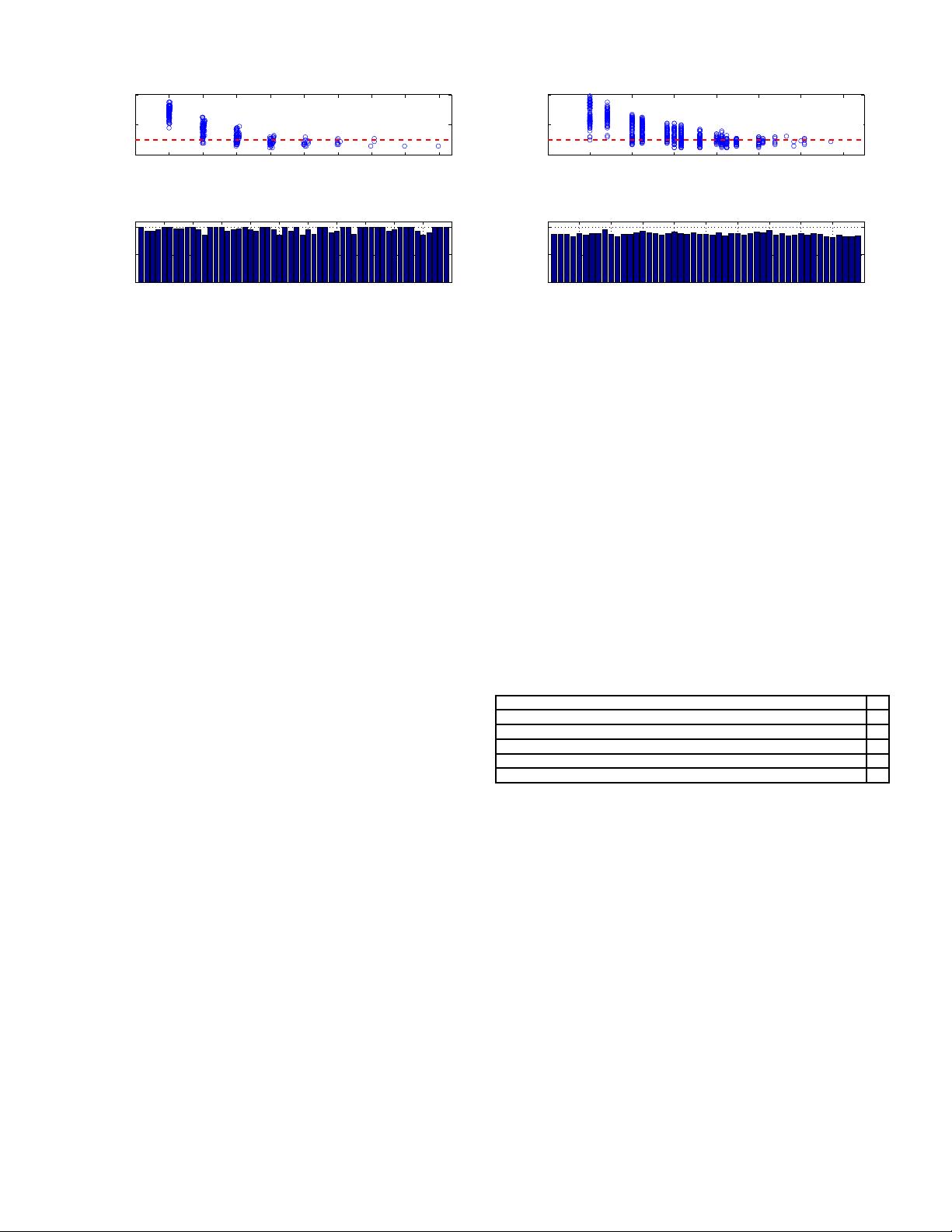
indicating connectivity among neighboring nodes. Our experi-
mental study confirms th a t in outdoor open-air scenarios, the ra-
dio signal stren gth weakens approx imately monotonically with
the physical distance, especially from the v iewpoint of a sin-
gle no de, where RSS m ight provide heuristic inf ormation about
which neighboring nodes are closer and which are further.
Based on o ur empirical study, this p aper introduces a novel
range-free approach to extracting relative distance informa-
tion from neighborhood orderings which serve as unique high-
dimensional location signatures for sensor nodes in the net-
work. In stead of offering yet another new localization method,
the design described in this p aper can be conveniently ap-
plied as a transparent su pporting layer for many state-of-the-art
connectivity-based localization algorithms, provid ing a low-cost
but effective solutio n for greatly improving system accuracy.
We augmen te d three range-free localization algorithms -
MDS-MAP [26], DV-Hop [27], RPA [33], with our de sig n, and
evaluated the effectiveness of the proposed design in two types
剩余13页未读,继续阅读













评论0