

Integre Technical Publishing Co., Inc. Liu January 13, 2000 8:45 a.m. chap1 page 1
CHAPTER 1
Typical Real-Time Applications
From its title, you can see that this book is about real-time (computing, communication, and
information) systems. Rather than pausing here to define the term precisely, which we will
do in Chapter 2, let us just say for now that a real-time system is required to complete its
work and deliver its services on a timely basis. Examples of real-time systems include digital
control, command and control, signal processing, and telecommunication systems. Every day
these systems provide us with important services. When we drive, they control the engine
and brakes of our car and regulate traffic lights. When we fly, they schedule and monitor the
takeoff and landing of our plane, make it fly, maintain its flight path, and keep it out of harm’s
way. When we are sick, they may monitor and regulate our blood pressure and heart beats.
When we are well, they can entertain us with electronic games and joy rides. Unlike PCs and
workstations that run nonreal-time applications such as our editor and network browser, the
computers and networks that run real-time applications are often hidden from our view. When
real-time systems work correctly and well, they make us forget their existence.
For the most part, this book is devoted to real-time operating systems and communica-
tion protocols, in particular, how they should work so that applications running on them can
reliably deliver valuable services on time. From the examples above, you can see that mal-
functions of some real-time systems can have serious consequences. We not only want such
systems to work correctly and responsively but also want to be able to show that they indeed
do. For this reason, a major emphasis of the book is on techniques for validating real-time
systems. By validation, we mean a rigorous demonstration that the system has the intended
timing behavior.
As an introduction, this chapter describes several representative classes of real-time ap-
plications: digital control, optimal control, command and control, signal processing, tracking,
real-time databases, and multimedia. Their principles are out of the scope of this book. We
provide only a brief overview in order to explain the characteristics of the workloads gener-
ated by the applications and the relation between their timing and functional requirements. In
later chapters, we will work with abstract workload models that supposely capture the rele-
vant characteristics of these applications. This overview aims at making us better judges of
the accuracy of the models.
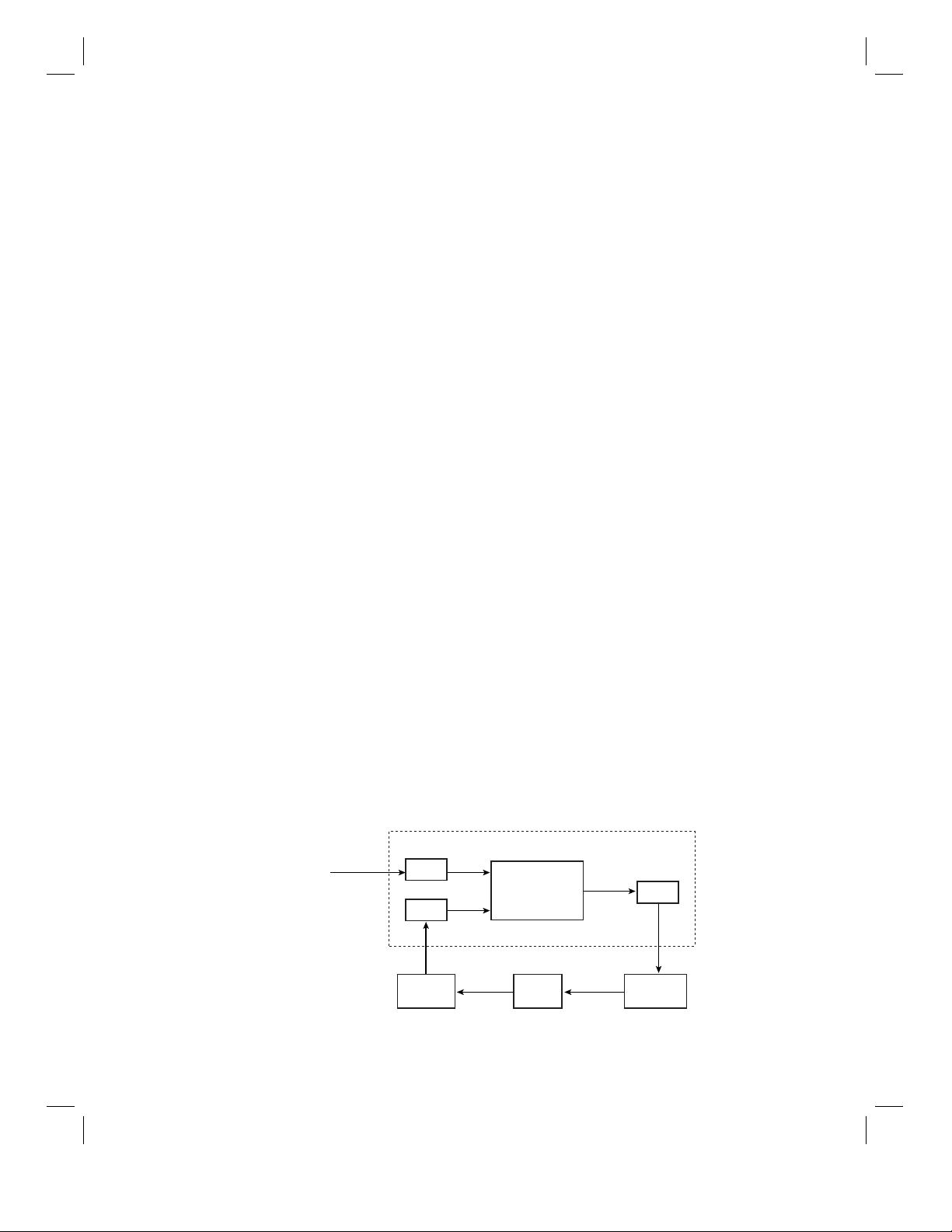
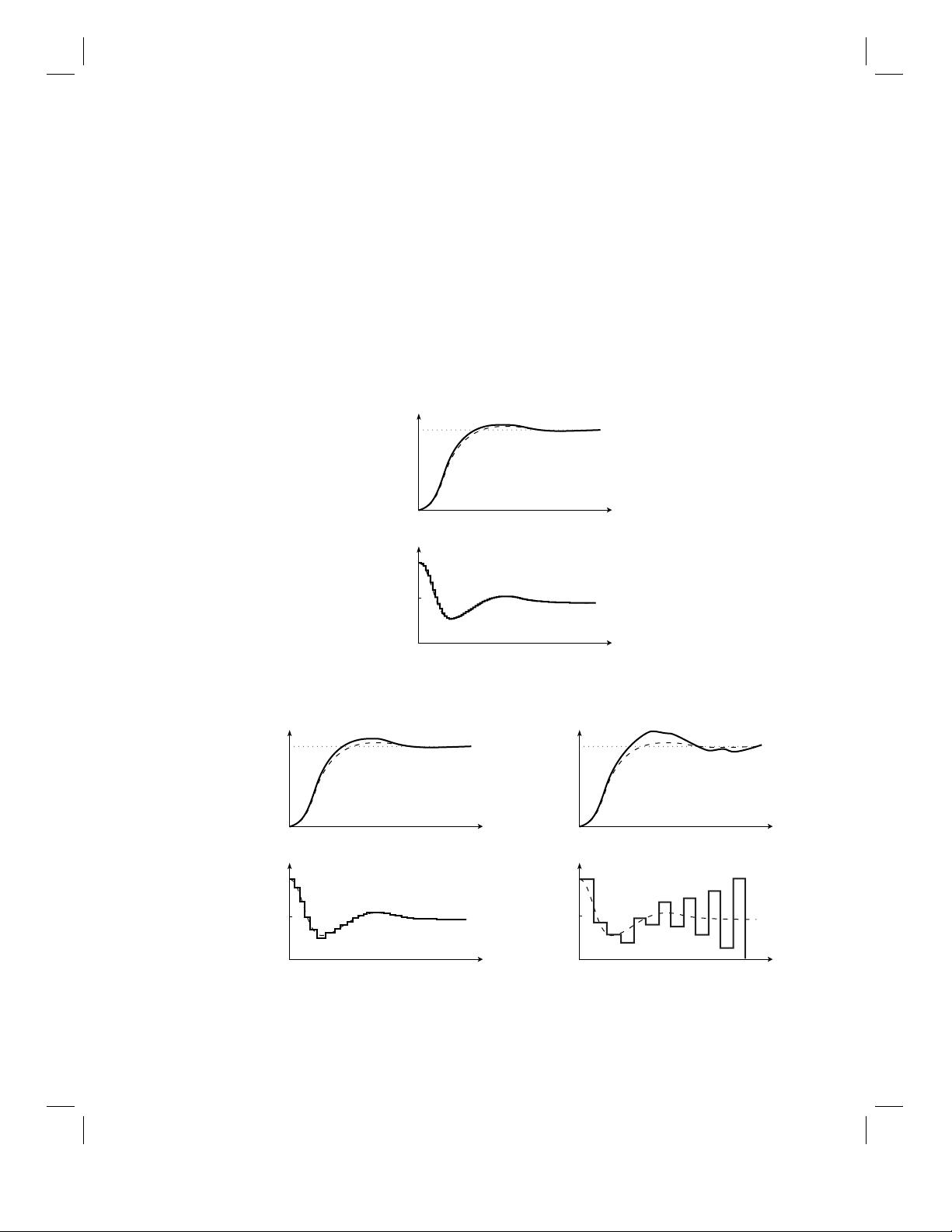
In this chapter, we start by describing simple digital controllers in Section 1.1. They are
the simplest and the most deterministic real-time applications. They also have the most strin-
gent timing requirements. Section 1.2 describes optimal control and command and control
applications. These high-level controllers either directly or indirectly guide and coordinate
1

剩余408页未读,继续阅读






评论0
最新资源