力士乐伺服阀

需积分: 0 18 浏览量
更新于2012-04-27
收藏 402KB PDF 举报
### 力士乐伺服阀知识点概述
#### 一、力士乐伺服阀基本介绍
**力士乐伺服阀**是一种高性能的液压控制元件,广泛应用于工业自动化领域中的精确位置、速度、压力及力的闭环控制。该说明书为英文版本,针对的是型号为4WRTE10–3X/系列的产品,其工作压力可达5100 PSI (350 bar)(对于尺寸16至32),或4600 PSI (315 bar)(对于尺寸10)。最大流量可达423 GPM (1600 L/min)。
#### 二、力士乐伺服阀特点
- **双级控制结构**:该阀采用了先导操作的两级控制结构。
- **适用于闭环控制**:适合于对位置、速度、压力和力等参数进行闭环控制。
- **先导控制阀**:由两个直接操作的电磁阀组成,并具有位置控制功能和压力平衡设计。
- **主阀自中心定位**:主阀阶段可实现自中心定位,并且受位置控制。
- **集成电子控制与调节系统**:内置了控制和调节电子元件,便于实现更精确的控制。
- **标准接口**:可安装在ISO 4401-5, 7, 8 或 10、NFPA 3.5.1M R1 和 ANSI B93.7 D05, D07, D08 或 D10 接口上。
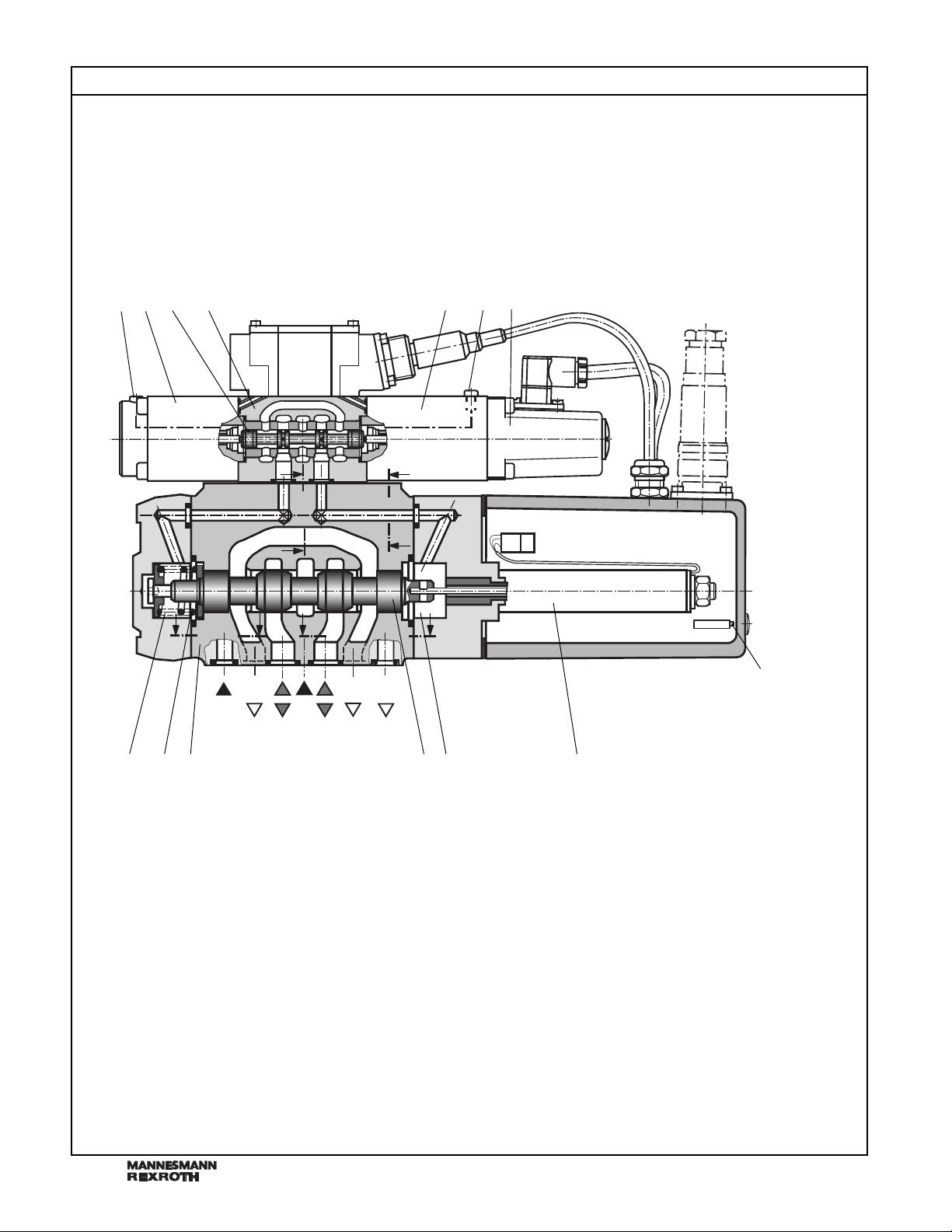
#### 三、力士乐伺服阀具体结构与功能描述
##### 1. 结构组成
力士乐伺服阀主要由以下几部分构成:
- **阀体(1)**:包含主阀芯(2)。
- **集成电子模块(3)**:包括主阀芯的电感式位移传感器。
- **先导控制阀(4)**:含有阀芯和套筒组件(5)、电感式位移传感器(6)以及用于主阀芯(2)中立位置的压力平衡设计。
##### 2. 工作原理
- 当比例电磁铁(7, 8)处于静止状态时,通过弹簧(9)使主阀芯(2)保持在中心位置。
- 控制通道中的压力变化会导致主阀芯移动,从而改变流体流量和方向。
- 先导控制阀中的电感式位移传感器(6)可以监测主阀芯的位置,并将信号反馈给电子控制单元,以便实时调整主阀芯的位置,实现精确的控制。
#### 四、规格与技术数据
- **工作压力**:最高可达5100 PSI (350 bar)(尺寸16至32)或4600 PSI (315 bar)(尺寸10)。
- **最大流量**:最高可达423 GPM (1600 L/min)。
- **尺寸范围**:提供尺寸10、16、25和32的型号。
- **电气连接**:说明书提供了电气连接的具体信息,包括端子连接和内置电子器件的布线图。
- **操作曲线**:提供了不同尺寸下的操作曲线图表,这些曲线可以帮助用户更好地了解产品在不同条件下的性能表现。
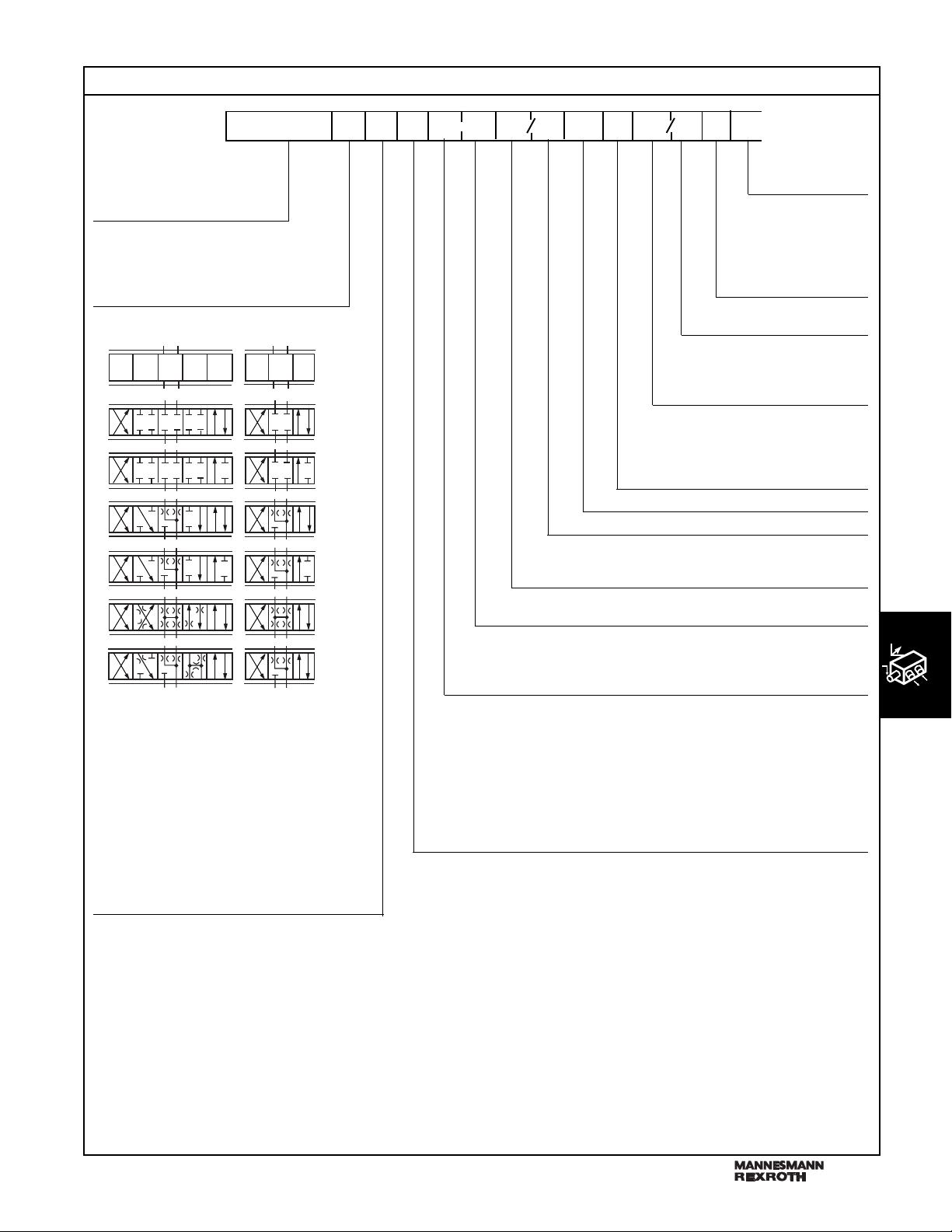
#### 五、符号与图表说明
- **简化的和详细的符号**:说明书还包含了简化和详细的符号说明,方便用户理解各个部件的功能。
- **功能描述与剖面图**:通过详细的剖面图展示了阀门的工作原理和内部结构,有助于用户深入了解其运作机制。
力士乐伺服阀以其精确的控制能力和广泛的适用性,在各种工业自动化应用中发挥着重要作用。通过上述详细介绍,读者可以更加全面地理解这款产品的特性和使用方法。
1/16
Model 4 WRTE 10...–3X/...
Sizes 16 to 32
... 5100 PSI ( 350 bar)
Size 10
... 4600 PSI (315 bar)
RA
29 082/06.98
Replaces: 03.96
... 423 GPM
(...1600 L/min)
4/3 - Directional Control Valve
Model 4 WRTE, Series 3X
H/A 3344/92
Characteristics:
– Pilot-operated 2-stage control valve
– Suitable for closed loop controlling of position, velocity,
pressure and force
– Pilot control valve:
direct operated 2 solenoid valve, position controlled with
pressure balancing
– Main stage self centering, position controlled
– Integral control and regulating electronics
– Mounts on standard ISO 4401-5, 7, 8 or 10, NFPA 3.5.1M
R1 and ANSI B 93.7 D 05, D 07, D 08 or D 10 interfaces
RA 29 082/06.98
Contents Page
Operating curves, size 10 8
Operating curves, size 16 9
Operating curves, size 25 10
Operating curves, size 32 11
Unit dimensions, size 10 12
Unit dimensions, size 16 13
Unit dimensions, size 25 14
Unit dimensions, size 32 15
Pilot fluid supply 16
Table of Contents
Contents Page
Symbols (Simplified and Detailed) 1
Description of function, cross-section 2
Ordering codes 3
Technical data 4
Electrical connection 4
Terminal connections/block wiring diagram
for integral electronics 5
Operating curves, general 6, 7
Symbols
A
B
P
T
a
0
b
X
A
B
P
T
a
0
b
A
B
P
T
a
0
b
Y
A
B
P
T
a
0
b
Y
X
Simplified
Detailed
Model WRTE . . –3X/ . . . .
Model WRTE . . –3X/ . . E .
Model WRTE . . –3X/ . . ET .
Model WRTE . . –3X/ . . T .
A
B
P
T
b
a
X
Y
(e.g. Model WRTE . . W. . –3X/ . . . )
剩余15页未读,继续阅读
199 浏览量
161 浏览量
190 浏览量
102 浏览量
2021-08-18 上传
153 浏览量
2020-03-09 上传
145 浏览量
2019-12-10 上传
174 浏览量
104 浏览量
资源评论


jq1937
- 粉丝: 0
- 资源: 1









最新资源
- springboot项目志同道合交友网站.zip
- springboot项目在线考试系统.zip
- springboot项目在线互动学习网站设计.zip
- springboot项目制造装备物联及生产管理ERP系统.zip
- springboot项目智慧校园之家长子系统.zip
- springboot项目中国陕西民俗网.zip
- RISCV GD32VF103 中断向量模式以及非向量模式
- 基于Rust语言的快速异步与多路复用Redis驱动设计源码
- 基于Vue的教程:学生课业帮扶系统前端设计源码
- 基于JavaScript的在线中国象棋对战平台设计源码
- 基于Lua语言的ESP32嵌入式系统开源设计源码
- 基于Vue的云盘前端设计源码
- 自动驾驶控制-车辆三自由度动力学MPC跟踪双移线 matlab和simulink联合仿真,基于车辆三自由度动力学模型的mpc跟踪双移线
- 分布式驱动汽车稳定性控制 采用分层式直接横摆力矩控制,上层滑模控制,下层基于轮胎滑移率最优分配 滑模控制跟踪横摆角速度和质心侧偏角误差 七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模
- 基于Vue.js框架的旅游舆情分析项目设计源码
- 基于TypeScript的轻量级JavaScript点阵库设计源码
