道路车辆功能安全标准(FuSa)基础(五)
原创 模拟世界 模拟世界 2 月 16 日
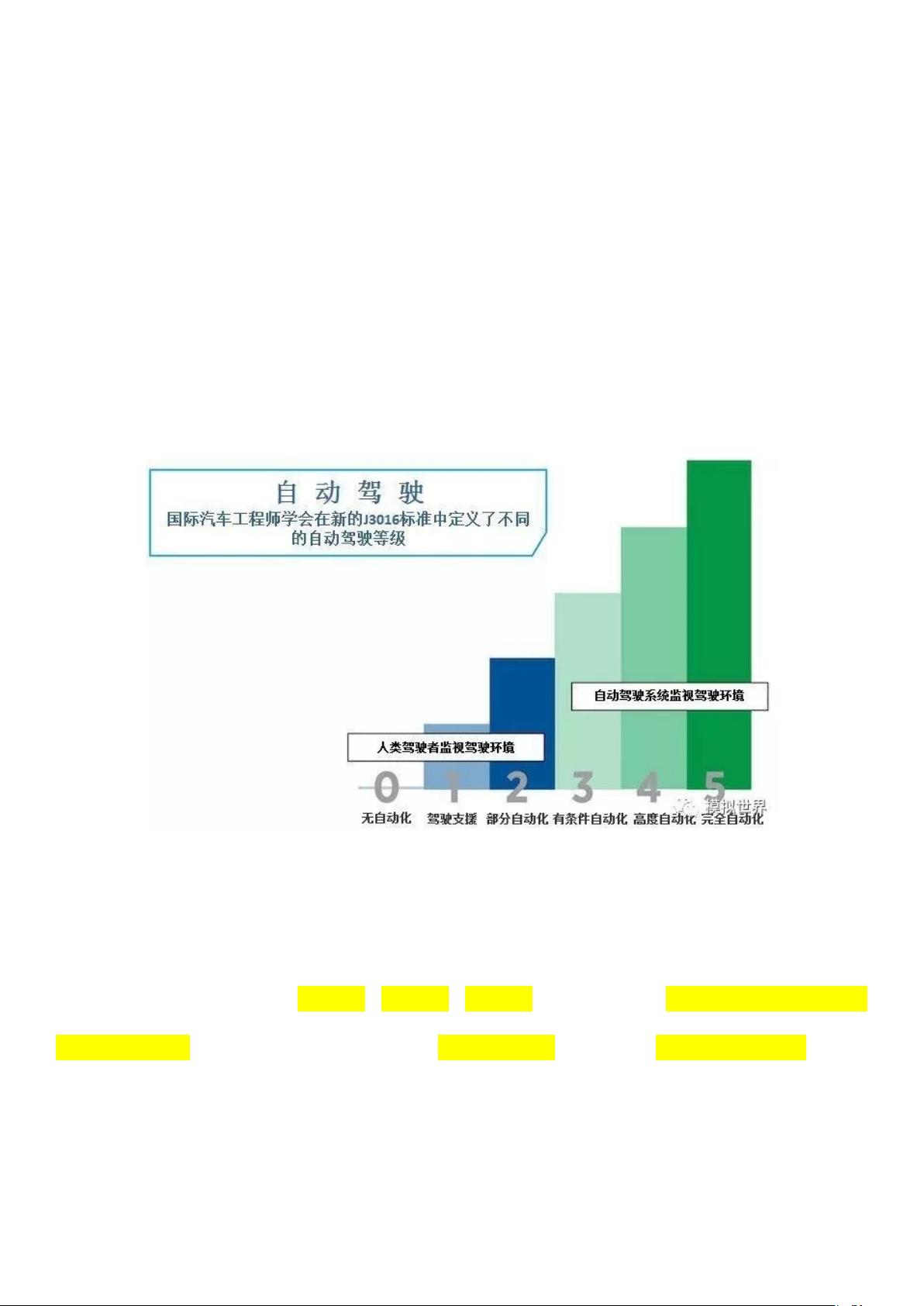
预期功能的安全性(SOTIF, Safety of the Intended Functionality)
然而,ISO26262:2018 标准中仍缺少关于自动驾驶车辆开发的细节规定。在第二版 ISO 26262 发布后,
这项遗漏的主题将出现在国际标准化组织公共适用规范标准 ISO/PAS 21448 之中。这项新标准通常被称为
SOTIF,即“预期功能安全”。
ISO 26262 标准和 SOTIF 所最终解决的问题,将涉及汽车供应链的所有部分。例如,设计自动化软件
将用于解决汽车产品环境中部件的质量和可靠性问题 SOTIF 是与功能安全非常接近的概念,2016 年相关工作组
提议覆盖这个工作领域的相关工作,「ISO/PAS21448 道路车辆—预期功能安全性」目前在处于开发阶段,该
标准的相关开发人员正是 ISO26262 标准的开发人员,而这一标准很可能被纳入最新版的 ISO 26262 标准。
ISO 26262 标准对风险评估软件的功能要求进行了规定,并对使用此类软件具有信心。ISO2626 标准 2
第 8 部分第 11 条对此进行了说明。对于适用于汽车设计、制造和系统操作中使用的所有软件,标准规定了软件
工具合格证书的具体要求。
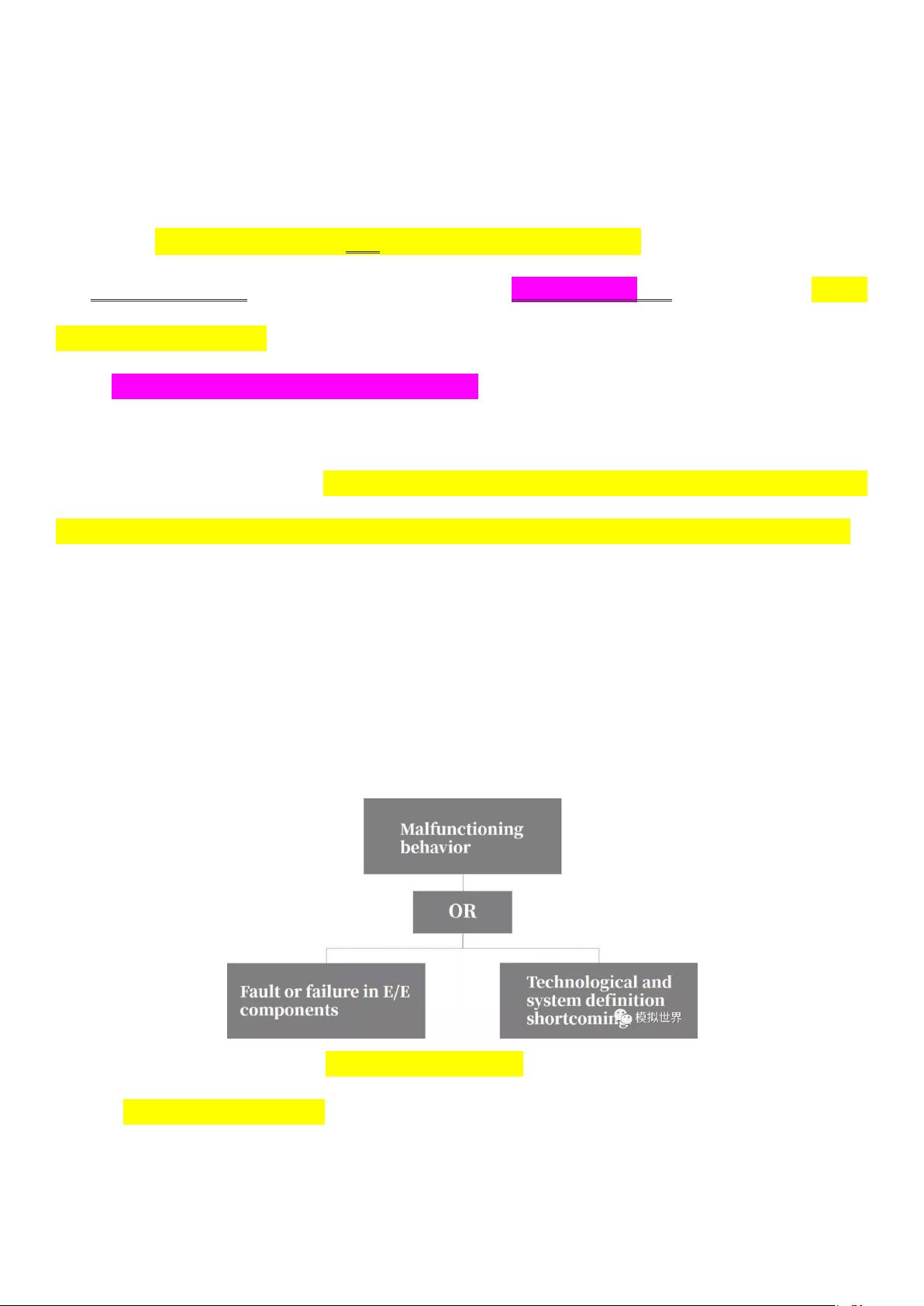
下图展现了 SOTIF 相比功能安全的定义,可以看出,在两种情况下,都涉及多功能行为及其风险,而
其差异主要体现在多功能的起因。
对于功能安全,通常着重考察电子电气系统失效及故障,如软件中的电容器短路或缓冲区溢出;而 SOTIF
更加注重技术的缺陷及系统相关定义,如图像识别的精度,雷达的抗干扰性,在 SOTIF 案例中,没有故障及失
效。
预期功能的安全性与功能安全侧重点