目录
ROS机器人学习_58 1
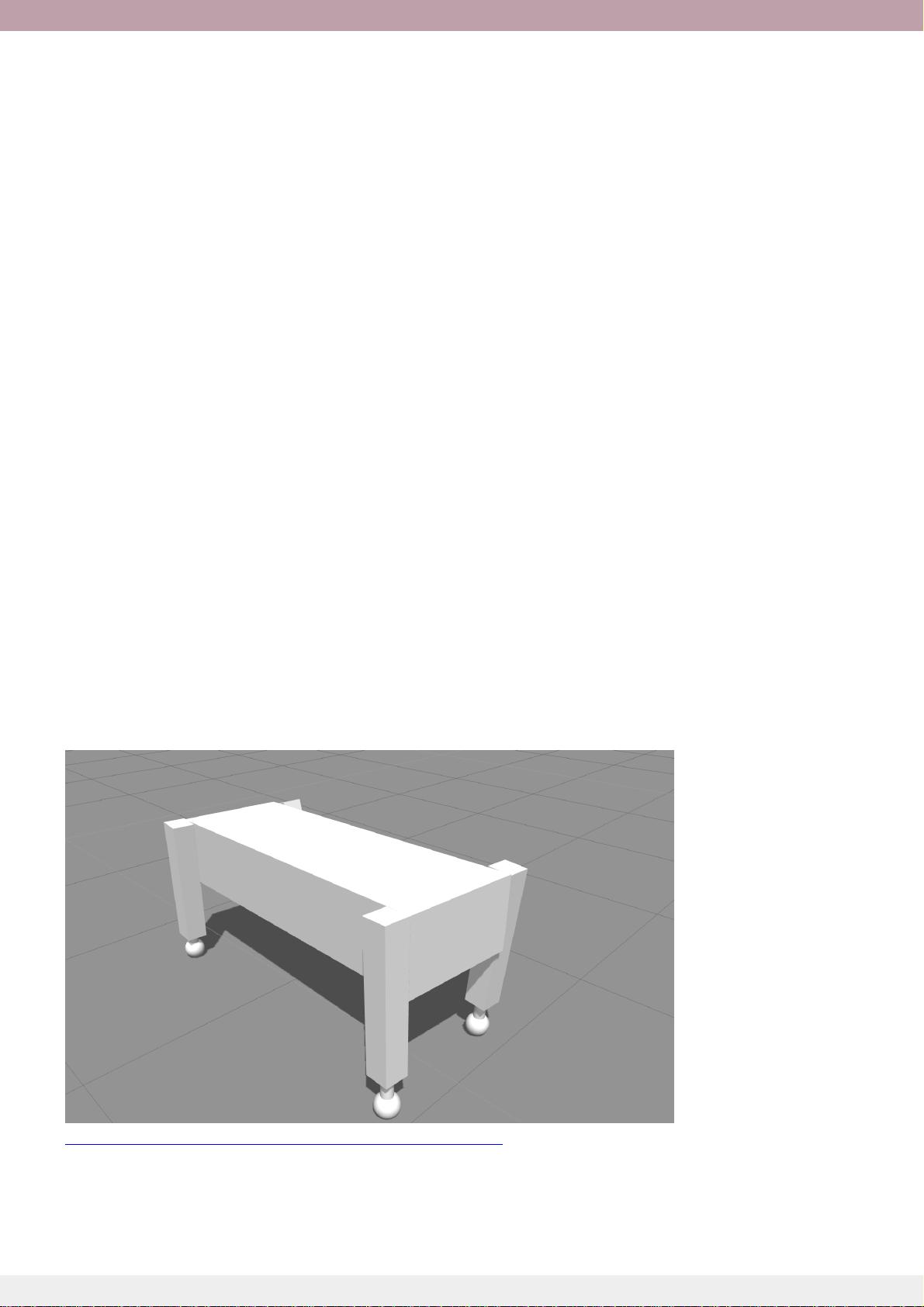
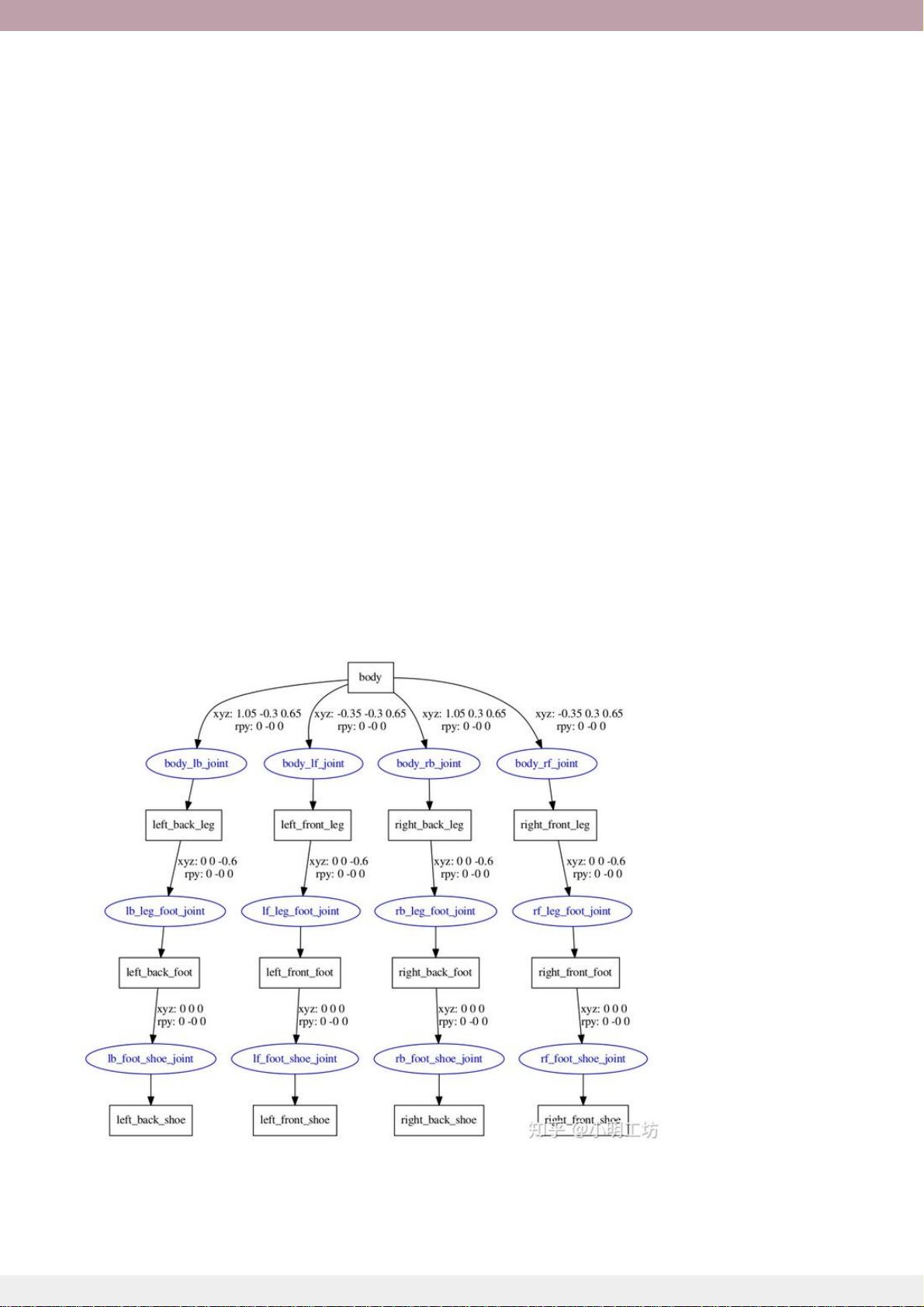
第1篇 【ROS-Gazebo】开源四足机器人仿真模型pig_dog 2
第2篇 【ROS-Gazebo】pigot开源四足机器人项目改进 6
第3篇 【ROS-Gazebo】平衡与舞蹈-pigot四足机器人姿态控制仿真 10
第4篇 【ROS-Gazebo】IMU插件使用与数据采集——以四足机器人pigot为例 14
第5篇 【ROS-SLAM】Cartographer ROS官方文档翻译学习(1)——下载与安装 24
第6篇 【ROS-SLAM】Cartographer ROS官方文档翻译学习(2)——运行演示程序 26
第7篇 【ROS-SLAM】Cartographer ROS官方文档翻译学习(3)——应用到自己的机器人 29
第8篇 【ROS-SLAM】四足机器人SLAM仿真 33
第9篇 【ROS-Moveit!】机械臂控制探索(2)——Moveit!与Gazebo联合仿真方法 43
第10篇 【ROS-Moveit!】机械臂控制探索(3)——基于python的API示例代码分析 54
第11篇 【ROS】pigot四足机器人控制仿真综合(一)——倒地恢复 67
第12篇 【读书笔记】四足机器人的发展历史 74
第13篇 【基础知识】四足机器人的站立姿态控制原理 80
第14篇 【ROS-Moveit!】机械臂控制探索(1)——Moveit!配置助手的使用教程 87
第15篇 【个人开源】机器人运动规划学习工具箱使用说明 110
第16篇 【ROS-Gazebo】SDF机器人描述格式解析 114
第17篇 【ROS-Gazebo】仿真插件编写教程(1)——概述 122
第18篇 【ROS-Gazebo】仿真插件编写教程(2)——编写位置控制插件 127
第19篇 【ROS-Gazebo】为什么选择SDF? 142
第20篇 【ROS-Gazebo】SDF规范文档与模型资源 146
第21篇 【ROS-Gazebo】SDF的建模与使用 150
第22篇 【ROS-Gazebo】ERB:模块化生成SDF模型 156
第23篇 【ROS-Gazebo】SDF与URDF的相互转换 162
第24篇 【ROS-Gazebo】基于SDF的多机器人仿真 168
第25篇 【机器人入门】现代机器人学:机构、规划与控制 172
第26篇 一份应届机器人小白的职场体验:做了什么与想做什么 177