
Multi-scale edge detection on range and intensity images
S.A. Coleman
a,
n
, B.W. Scotney
b
, S. Suganthan
c
a
School of Computing and Intelligent Systems, University of Ulster, Magee, Northland Road, Londonderry, County Londonderry, BT48 7JL, UK
b
Smart Sensors Ltd., Carpenter House Innovation Centre, Broad Quay, Bath, UK
c
School of Computing and Information Engineering, University of Ulster, Coleraine, UK
article info
Article history:
Received 19 November 2009
Received in revised form
17 September 2010
Accepted 10 November 2010
Keywords:
Range
Intensity
Scale
abstract
Multi-scale feature extraction has become prominent in recent years. Additionally, processing images
containing sparse or irregularly distributed data has become increasingly important, in particular with
respect to the use of range image data. We present a family of multi-scale gradient-based edge detection
algorithms that are suitable for use on either regularly or irregularly distributed image data; these
algorithms can be applied directly to the range and intensity images without any image pre-processing.
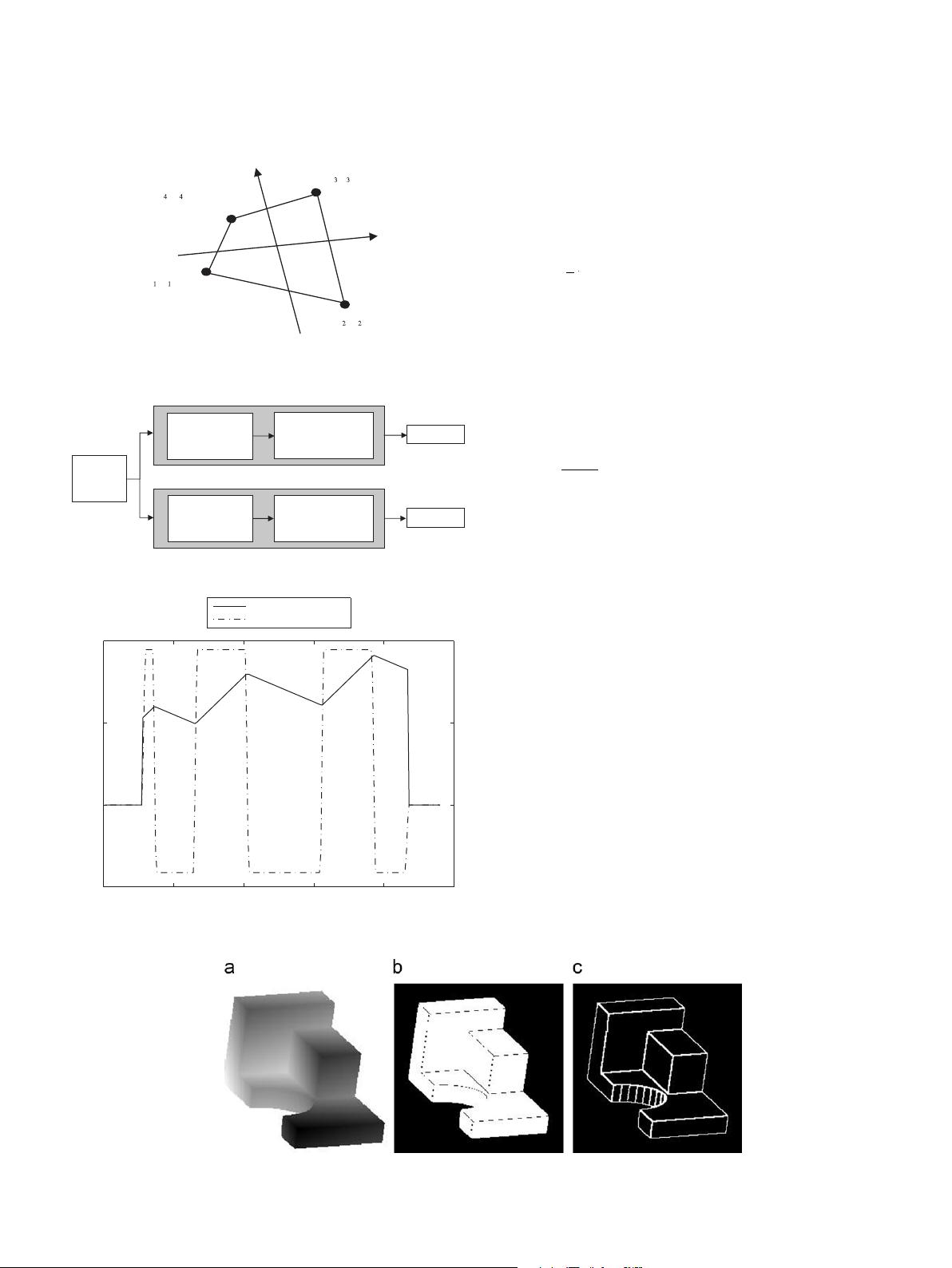
We quantitatively evaluate our algorithms on synthetic intensity and range images and also provide
comparative visual output, using real images. The results demonstrate that this approach can be
successfully applied to both range and intensity images, providing results that for intensity images are
more accurate than from traditional gradient operators and for range images are more accurate than from
the scan-line approximation.
& 2010 Elsevier Ltd. All rights reserved.
1. Introduction
For many years, feature extraction algorithms have been devel-
oped for use on intensity images, the earliest being the simple
gradient operators of Sobel and Prewitt. More recently extensive
efforts have been made to develop multi-scale feature extraction
approaches, for example [9,11,17,24]. Whilst much research has
been carried out to develop edge detection methods for range image
data, little has focussed on the area of multi-scale, or adaptive, edge
detection methods. Multi-scale boundary detection in range images
has proven to be effective at dealing withdiscontinuities occurring at
a variety of spatial scales. Gunsel et al. [19] followed this approach by
considering the boundary detection process as a fusion of different
sensory processing modules, each corresponding to a specific scale.
The output of each module was modelled to be dependent on all
other outputs by being part of a joint a posteriori probability
distribution. Boundary detection was then achieved by maximising
this probability function, using the Bayesian approach. A multi-scale
approach is also necessary to achieve good localisation and relia-
bility for extracting low-frequency discontinuities, such as a smooth
crease, along with relatively high frequency events, such as jump
edges. One example of a multi-scale approach is that of [23] in which
Legendre polynomials were fitted to one-dimensional windows of
range data whilst varying the kernel size of the polynomial. Zero-
crossings of the second derivative were used to detect edges: when a
small kernel size was used, many zero-crossings, including noise,
were detected, whilst use of a large kernel size resulted in a decrease
in the quality of edge localisation.
In recent years, range imagery has become popular due to the
fact that it can provide a reliable 3D (often referred to as 2
1
2
D) scene
description. To provide richer data, range images are also often
used in conjunction with intensity image data [15]. However,
techniques for feature extraction in range images are not as readily
available as in intensity images [3,18], and moreover approaches
for feature extraction in intensity or range images can only be
applied to the specific image type for which they were designed;
none of the approaches could be readily applied to both intensity
and range images without performing an image pre-processing. As
much research has been undertaken in trying to integrate 2D and
3D images, specifically in application areas such as medical
imaging [13] and face recognition [12,27], we believe that a single
approach that can be used on both image types (i.e. both intensity
and range) would greatly aid the process of an image fusion.
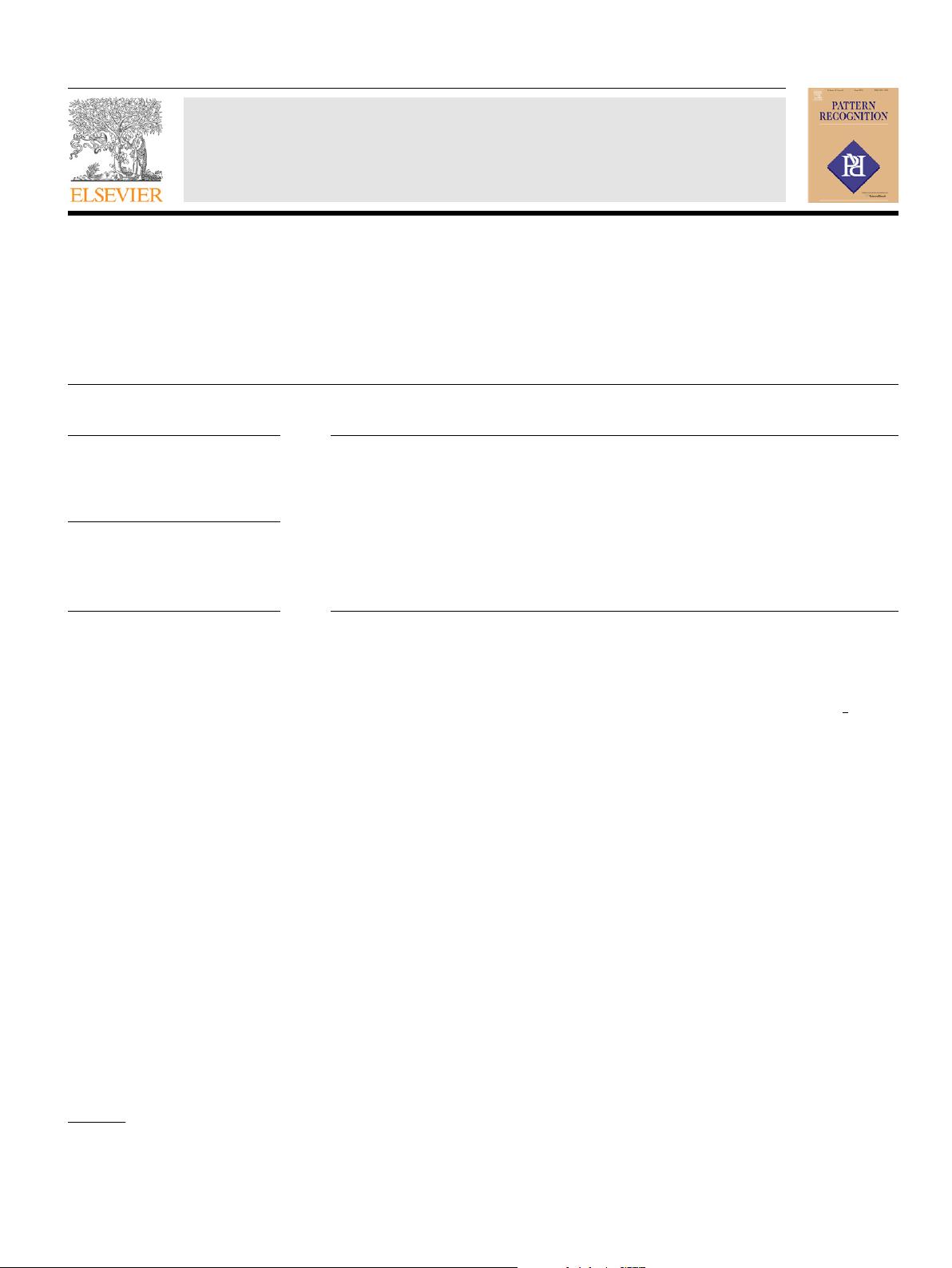
The problem of an edge detection when using range images
differs significantly from that when using intensity images, as spatial
sampling irregularity occurs with a variety of range image sensors.
The sampling grid for typical range data acquisition devices, such as
OSU’s Minolta 700 range scanner, the Perceptron LASAR sensor, and
the K2T range sensor, may display perturbations from a regular
rectangular grid that can be as high as 33% of the average pixel
separation. Hence, when conducting any processing function, the
locational distribution of the image data must be considered
explicitly along with the values of the image data. Image processing
algorithms typically rely on regularly sampled, complete, image
data. Therefore, in order for standard image processing algorithms to
be applied to irregularly distributed image data, the data must be
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/pr
Pattern Recognition
0031-3203/$ - see front matter & 2010 Elsevier Ltd. All rights reserved.
doi:10.1016/j.patcog.2010.11.005
n
Corresponding author. Tel.: +44 2871375030; fax: + 44 2871375470.
E-mail address: sa.coleman@ulster.ac.uk (S.A. Coleman).
Pattern Recognition 44 (2011) 821–838
剩余17页未读,继续阅读
资源评论


hyide
- 粉丝: 0
- 资源: 1









最新资源
- 基于java的在线动漫周边店的设计与实现
- 生成式 AI 爆发:医疗 AI 走到十字路口
- 基于Matlab实现三相电压型PWM逆变电路仿真模型.rar
- LVBench: An Extreme Long Video Understanding Benchmark
- 基于javaweb的在线投票系统论文.doc
- 在digital电路中,用两个或非门实现一个锁存器
- 基于web的在线心理咨询系统的设计与实现论文.doc
- 圣诞节代码html飘雪花 代码实现示例.docx
- 基于java的足球直播论坛的设计与实现.doc
- Autoregressive Image Generation without Vector Quantization
- 基于web的中小企业信息管理系统
- 2024中国数字经济企业出海报告
- EFC-main.zip
- 基于Python的招聘数据采集分析平台的设计与实现.doc
- MDPO: Conditional Preference Optimization for Multimodal Large Language Models
- 使用C语言将二进制转为Verilog可识别的hex文件(如jpeg文件转mif文件)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


