### STM32CubeMX F4开发指南:实验02 GPIO 跑马灯
#### 一、概述
本文档详细介绍了如何使用STM32CubeMX软件进行STM32F4系列微控制器的GPIO配置,并通过一个简单的跑马灯实验来演示整个流程。STM32F4系列是基于高性能Arm® Cortex®-M4 32位RISC内核的微控制器,具有浮点单元(FPU),最高工作频率可达180MHz。它包含了各种增强型I/O和外设,适用于复杂的嵌入式应用。
#### 二、实验目的与意义
本实验的目标是通过STM32CubeMX图形化配置工具设置GPIO端口,实现两个LED灯(LED0和LED1)的轮流点亮和熄灭,形成跑马灯效果。通过这个过程,读者可以学习如何使用STM32CubeMX进行硬件配置、生成代码框架以及调试程序。
#### 三、实验准备
- **硬件准备**:确保开发板正确连接至PC机,且使用的是STM32F407ZGTx型号的微控制器。
- **软件准备**:安装STM32CubeMX软件和Keil MDK-ARM集成开发环境(IDE)。
#### 四、实验步骤详解
##### 4.1 硬件连接
根据实验要求,将LED0连接到PF9引脚,LED1连接到PF10引脚。这是通过开发板上的跳线或焊接方式实现的。
##### 4.2 选择正确的MCU型号
打开STM32CubeMX,新建项目并选择正确的微控制器型号STM32F407ZGTx,这一点非常重要,因为不同的型号可能会有不同的GPIO资源分配。
##### 4.3 配置GPIO
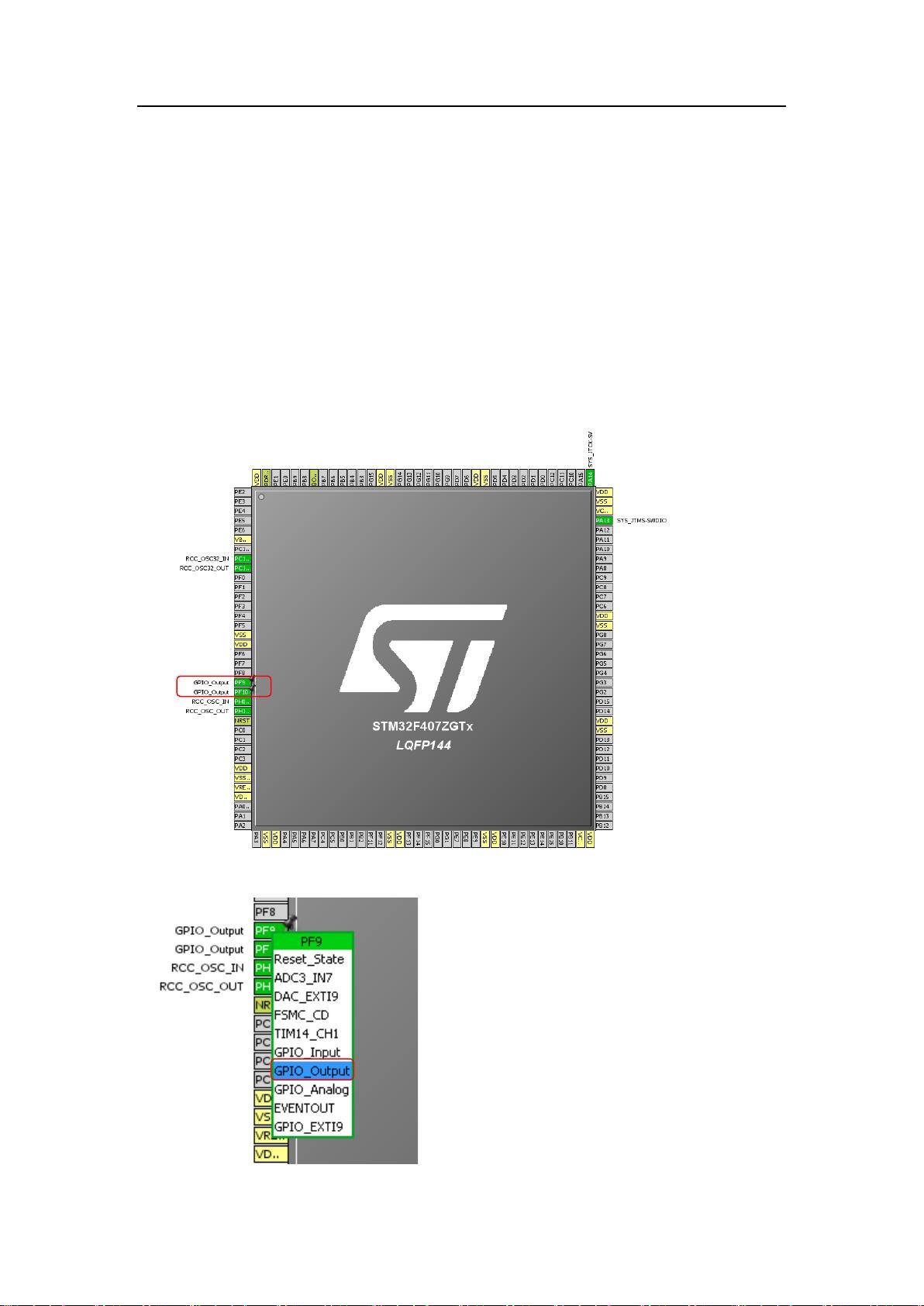
1. **选择GPIO Pinout**:在主界面右侧选择PF9和PF10,将其配置为输出模式(GPIO_Output)。
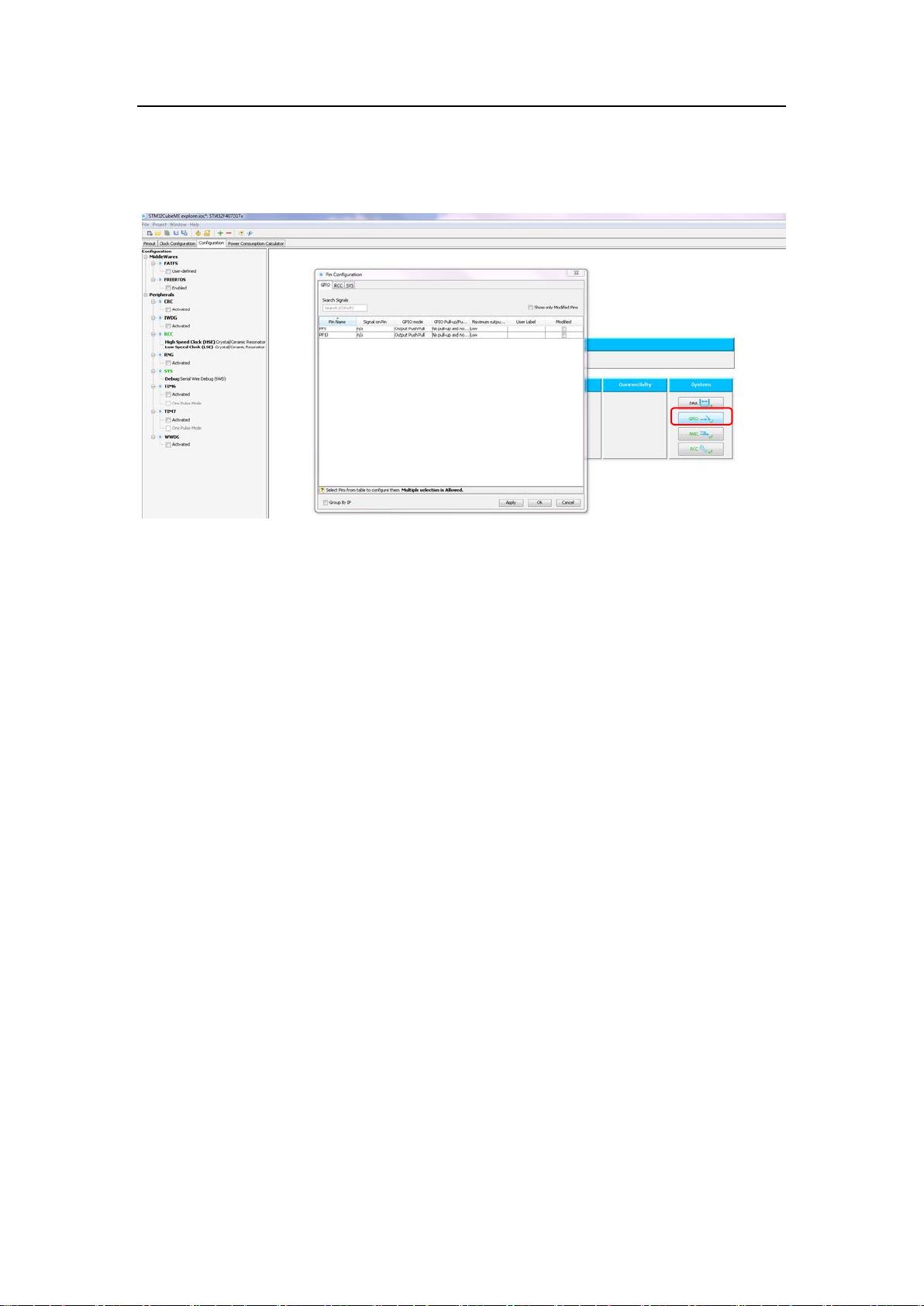
2. **配置GPIO属性**:点击“Configuration”属性页,然后选择右侧的“GPIO”按钮,这将弹出“Pin Configuration”对话框,在这里可以进一步配置引脚的工作模式、最大输出速度等参数。
3. **定义用户标签名**:为了便于识别,将PF9引脚的标签命名为DS0,PF10引脚的标签命名为DS1。这样在后续的编程过程中,可以直接使用这些标签名而无需记住具体的引脚编号。
##### 4.4 生成MDK-ARM项目
完成上述配置后,点击STM32CubeMX主界面工具栏上的“齿轮图标”,选择“Generate Source Code based on user settings”选项,生成MDK-ARM项目的源代码文件。
##### 4.5 编写控制代码
1. **打开main.c文件**:在生成的项目文件中找到main.c文件,打开它。
2. **添加控制代码**:在main()函数中添加以下代码片段以控制LED的状态:
```c
//turn on DS0
HAL_GPIO_WritePin(GPIOF, DS0_Pin, GPIO_PIN_RESET);
//turn off DS1
HAL_GPIO_WritePin(GPIOF, DS1_Pin, GPIO_PIN_SET);
//delay 250ms
HAL_Delay(250);
//turn off DS0
HAL_GPIO_WritePin(GPIOF, DS0_Pin, GPIO_PIN_SET);
//turn on DS1
HAL_GPIO_WritePin(GPIOF, DS1_Pin, GPIO_PIN_RESET);
//delay 250ms
HAL_Delay(250);
```
这段代码首先点亮DS0(LED0),熄灭DS1(LED1),等待250毫秒后,再熄灭DS0,点亮DS1,再次等待250毫秒,从而实现了LED的交替闪烁效果。
##### 4.6 编译与下载
1. **配置编译环境**:在Keil MDK-ARM IDE中,点击“Options for Target…”按钮配置编译环境。
2. **编译并下载**:编译生成的项目文件,并使用调试器将程序下载到开发板上。
至此,跑马灯实验就完成了。通过以上步骤,不仅学会了如何使用STM32CubeMX进行GPIO配置,还掌握了利用HAL库函数编写简单控制程序的方法。
#### 五、总结
通过本次实验,我们深入了解了STM32CubeMX工具的强大功能及其在GPIO配置中的应用,同时也熟悉了STM32F407ZGTx微控制器的基本操作方法。此外,还掌握了一种基本的LED控制技术——跑马灯,这对于未来更复杂的嵌入式系统设计具有重要的参考价值。