
基于 python 程序设计语言的相机标定
一、相机标定的原理
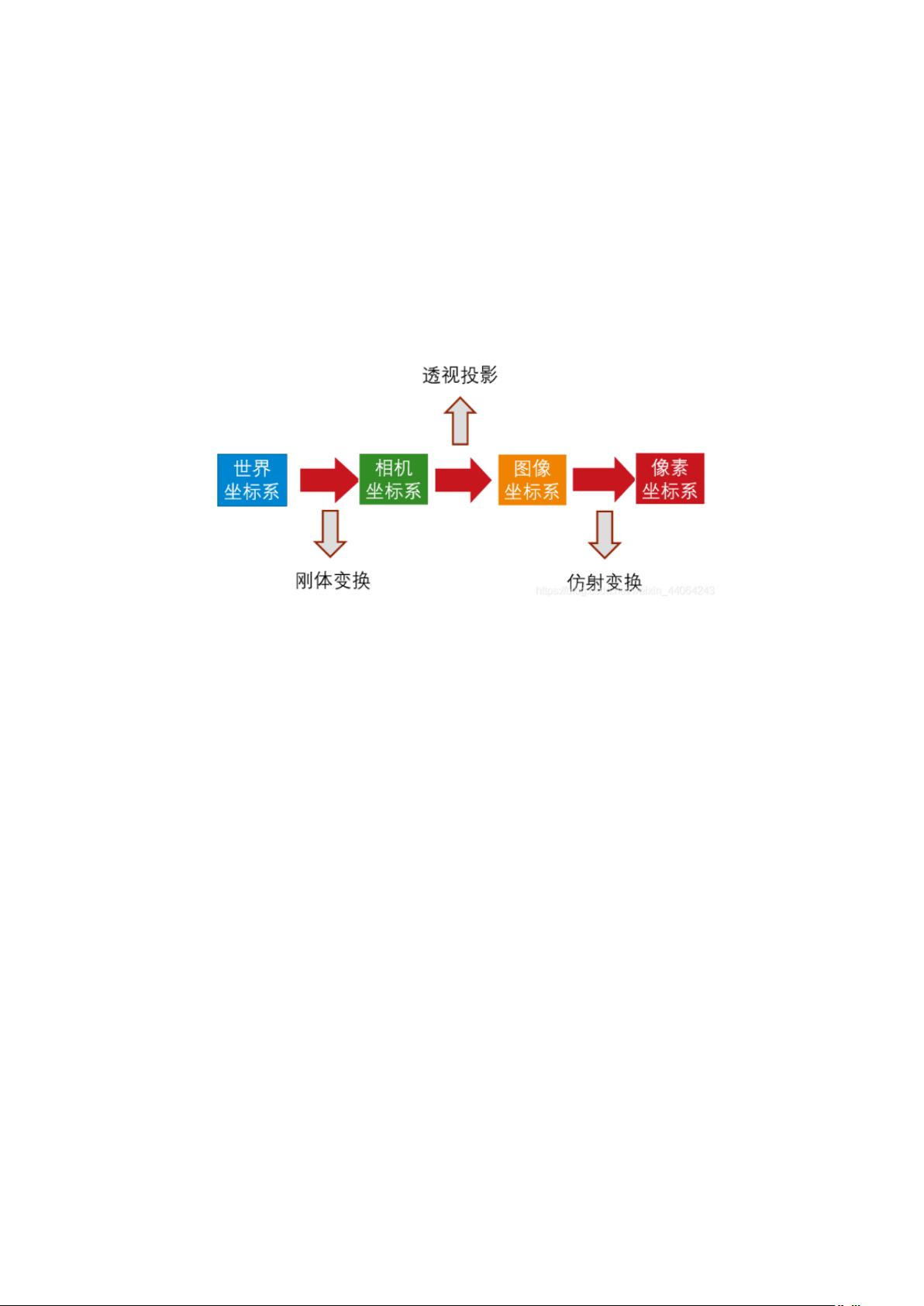
(一)相机如何成像
相机成像系统中,共包含四个坐标系:世界坐标系、相
机坐标系、图像坐标系、像素坐标系。相机成像的原理:
1.世界坐标系
世界坐标系也称为测量坐标系,是一个三维直角坐标系,
以其为基准可以描述相机和待测物体的空间位置。世界坐标
系的位置可以根据实际情况自由确定。
2.相机坐标系
相机坐标系也是一个三维直角坐标系,原点位于镜头光
心处,X、Y 轴分别与相面的两边平行,Z 轴为镜头光轴,与
像平面垂直。
3.像素坐标系
像 素 坐 标 系 是 一 个 二 维 直 角 坐 标 系 , 反 映 了 相 机
CCD/CMOS 芯片中像素的排列情况。原点位于图像的左上角,
轴、轴分别于像面的两边平行。像素坐标系中坐标轴的单位
资源评论

 2J2Q2K2A2024-09-03总算找到了想要的资源,搞定遇到的大问题,赞赞赞!
2J2Q2K2A2024-09-03总算找到了想要的资源,搞定遇到的大问题,赞赞赞! weixin_472183852024-05-23感谢资源主的分享,很值得参考学习,资源价值较高,支持!
weixin_472183852024-05-23感谢资源主的分享,很值得参考学习,资源价值较高,支持! m0_671701142024-07-02资源是宝藏资源,实用也是真的实用,感谢大佬分享~
m0_671701142024-07-02资源是宝藏资源,实用也是真的实用,感谢大佬分享~


hunter206206
- 粉丝: 149
- 资源: 49









最新资源
- STM32开发 IIR带阻滤波器 STM32实现IIR无限冲击响应带阻滤波器设计,巴特沃斯滤波器,代码工整,自编代码,注释详细,赠送巴特沃斯和切比雪夫IIR带阻滤波器MATLAB程序
- 四轴抓取视觉旋转标定源代码,学习机器视觉和运动控制的最佳例子,基于VS2015 C++ 实现,仿雅马哈四轴机械手抓取程序,实现把两个任意摆放的物料通过视觉算法和运动控制指令定位摆放到指定的位置并拼接起
- COOFDM的Matlab仿真程序,包括文档代码解释和理论解释
- 伺服驱动器,你还在为伺服驱动器 FPGA架构苦恼吗,本方案FPGA代码实现电流环 速度环 位置环 SVPWM 坐标变 测速 分频 滤波器等,程序方便移植不同的平台,具有很高的研究价值
- omron欧姆龙CJ CP程序 欧姆龙CJ2M-CPU35,主机架搭载两套从机架,ID263.OD263等输入输出IO模块 全自动电池注液封装机,NC413四轴模块轴控制,SCU31无协议读写欧姆龙E
- 基于PI控制器的单相逆变器闭环控制模型,采用电压电流双环控制 波形输出良好,输出跟随给定220V交流输出 运行环境为matlab simulink plecs等
- PLC案例 污水处理系统 - 污水处理项目 某大厂技术给某国企做的污水处理项目,程序规范,图纸清晰,具有很好的参考价值 PLC: 西门子s7 200smart 系统涉及好氧发酵、厌氧发酵、冷热水P
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


