

基于城市道路的自动驾驶行人车辆检测与计数
指导文档
一.项目说明
1.项目背景
随着自动驾驶技术的快速发展,对于精准、可靠的道路目标检测技术需求日益增长。在自动驾驶系统
中,道路目标的精确识别和定位对于提高驾驶安全性、增强车辆自主决策能力以及优化交通流量具有至
关重要的作用。作为智能交通系统的核心组成部分,计算机视觉技术通过自动获取和处理道路环境图
像,为车辆提供了一种有效的感知和识别周边环境的方法。这不仅极大提高了识别效率和自动化程度,
而且确保了检测的实时性和高准确性。
在此背景下,本次大赛旨在通过激发创新思维和促进先进计算机视觉与人工智能技术的研究与应用,推
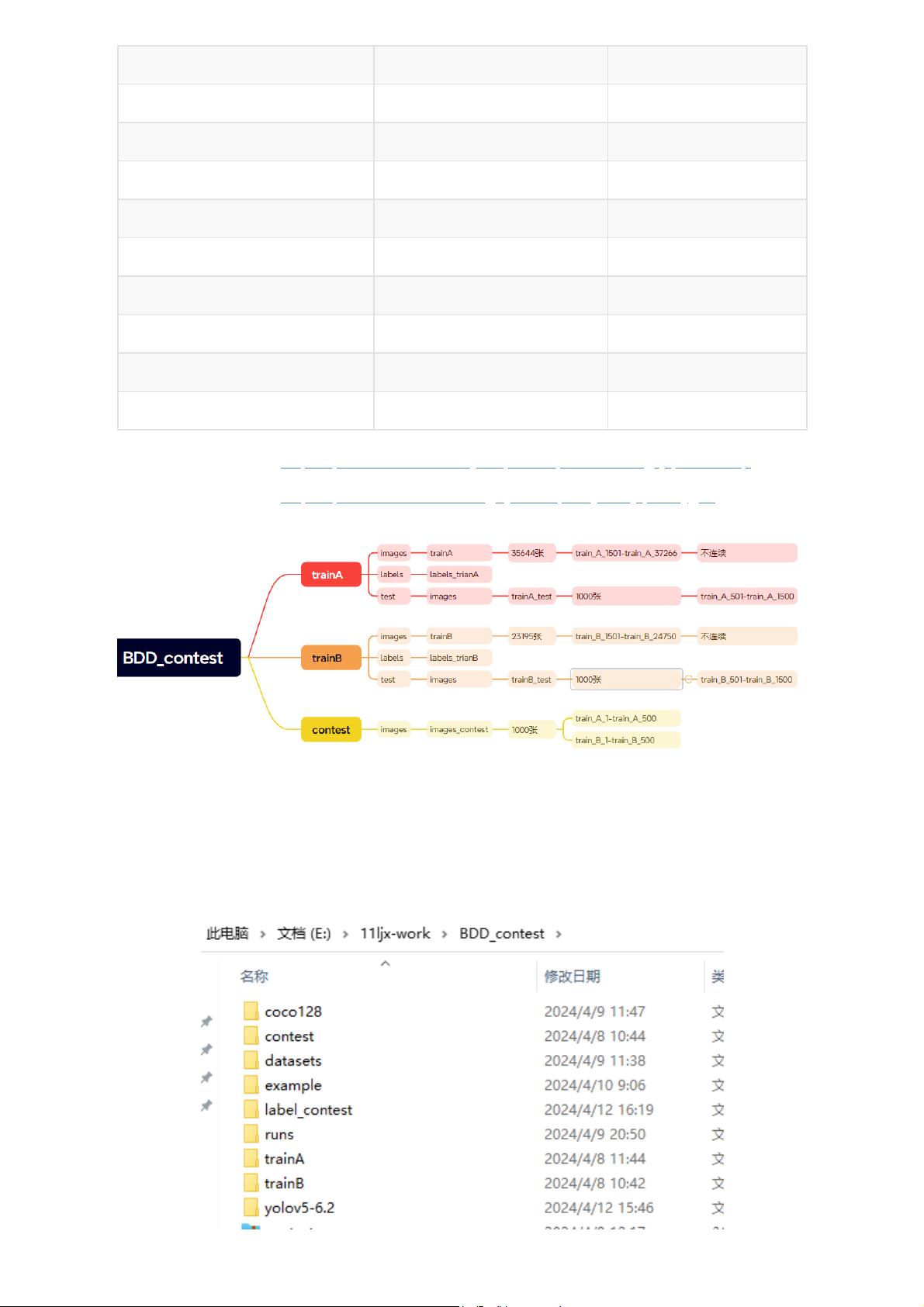
动自动驾驶技术和智能交通系统的发展。此次大赛将基于BDD100K数据集,这是一个全面、多样化的驾
驶行为数据集,它提供了从不同地理位置、不同天气条件和不同时间段收集的大量实际驾驶视频和图
像,以及详尽的标注信息,为参赛者提供了丰富的资源来开发和测试他们的道路目标检测算法。
通过参与本次挑战赛,参赛者将有机会将理论知识应用到实际问题中,不仅能提高参赛者在数据分析、
算法设计和模型训练等方面的技能,还能促进团队合作和解决问题的能力。此外,大赛也旨在通过竞赛
激发学生的创新精神,探索在复杂道路环境中进行高效准确目标检测的新方法,为自动驾驶技术的未来
发展贡献新的思路和解决方案。本次比赛本次比赛对参赛者的吸引点在于,参赛者可以在实战场景中锻
炼和提高自己的技术水平,借助 比赛平台,通过算法优化和迭代,提高算法识别效率和精度,经过训练
后的算法经过优化,然后在智能 边缘计算终端得到验证,从设计到实现及应用,步步为营,层层提升。
这不仅可以推进人工智能技术在 各个行业的应用,还可为参赛者提供更广阔的职业发展空间。
2.项目难点
1. 复杂多变的城市道路环境
城市道路环境复杂多变,包括不同的交通参与者(如行人、自行车、各类车辆)、复杂的交通标志和信
号灯系统、以及建筑物和自然环境等多种元素。在这种环境下,准确识别和定位目标,尤其是在交通密
集、场景复杂的情况下,对算法的识别能力和鲁棒性提出了极高的要求。
2. 光照条件和天气变化的影响
光照条件和天气变化对图像质量有显著影响,比如夜间、逆光、阴雨、雾天等条件下,目标检测的难度
显著增加。设计能够适应各种光照和天气条件的鲁棒算法是一个重大挑战。
3. 大规模数据的处理

剩余39页未读,继续阅读
资源评论


pk_xz123456
- 粉丝: 2753
- 资源: 3933









最新资源
- 2025跨年倒计时html代码:HTML+CSS+JS实现网页特效及用途
- python新年快乐代码,含 GUI、色彩与动画
- 灯泡灯头自动铆压紧固设备sw18可编辑全套技术资料100%好用.zip
- 跨年烟花源代码:HTML5 Canvas 实现动态交互式的跨年夜空烟花特效代码
- 基于Python与Flask构建简易用户管理系统源码及实现细节
- PPT资源浮标数据处理
- 灯板自动插线设备sw18可编辑全套技术资料100%好用.zip
- 基于matlab实现的中国跳棋图形界面双人对战系统
- 德国6层电万能蒸烤箱(sw21可编辑+cad)全套技术资料100%好用.zip
- python新年快乐代码
- 车用驱动电机原理与控制基础-P140公式(6-57)~(6-58)
- 计算机专业全阶段学习指南:从本科到职业发展的路径与建议
- 为圣诞节和新年装饰您的网站 - HTML & CSS 代码片段
- 计算机专业从入门到职业发展的全面学习指南
- 前端开发中JavaScript的数组与字符串操作详解及其应用
- Happy New Year Celebration
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


