3、LCA Lane Change Decision Aid
ISO 17387 Introduction 介绍
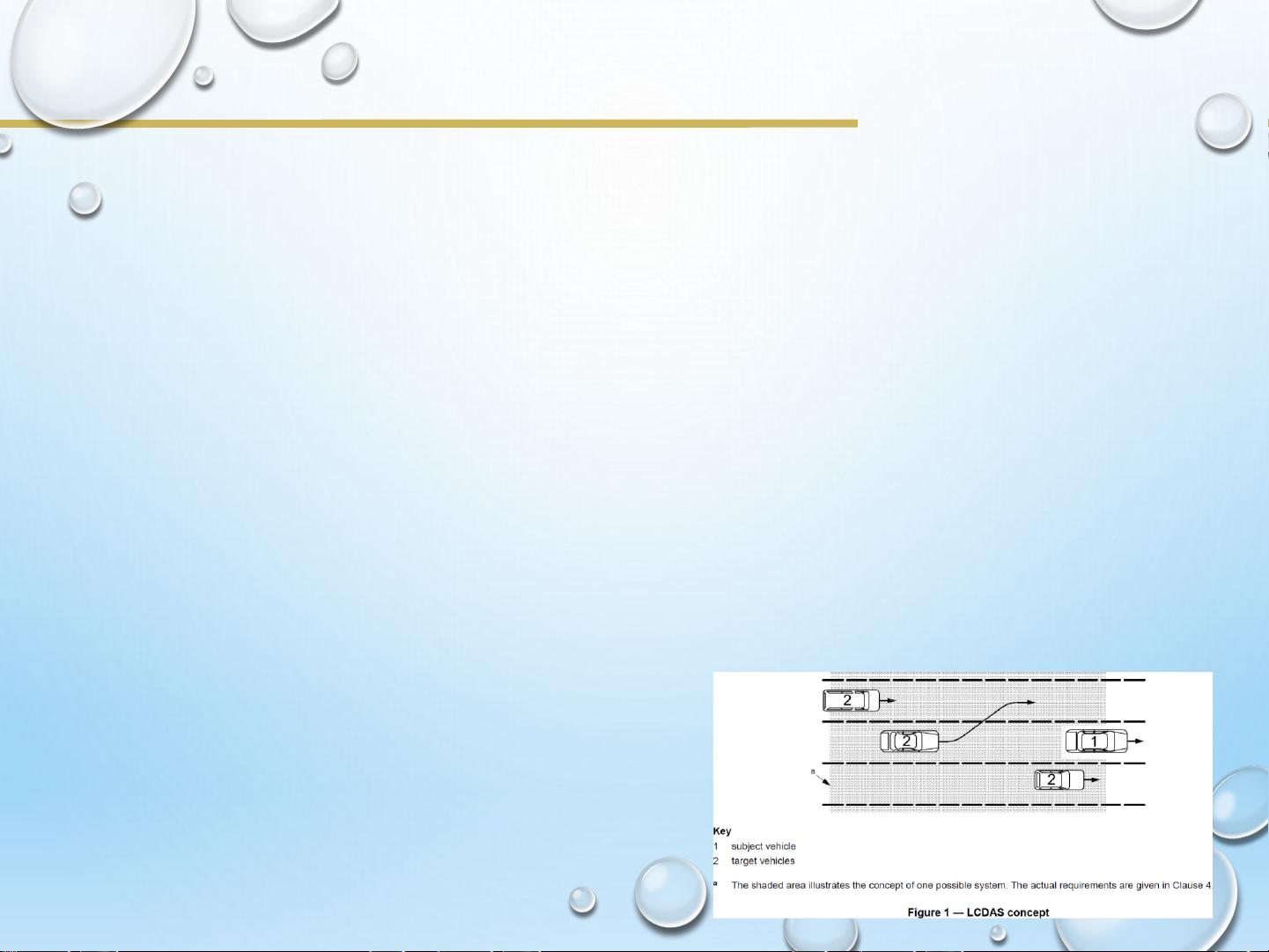
Lane Change Decision Aid Systems (LCDAS) warn the driver against collisions that
may occur due to a lane change manoeuvre. LCDAS are intended to supplement
the vehicle’s interior and exterior rear-view mirrors, not eliminate the need for such
mirrors. LCDAS are intended to detect vehicles to the rear and sides of the subject
vehicle (see Figure 1). When the subject vehicle driver indicates the desire to make
a lane change, the system evaluates the situation and warns the driver if a lane
change is not recommended. LCDAS are not meant to encourage aggressive
driving. The absence of a warning will not guarantee that the driver can safely make
a lane change manoeuvre. The system will not take any automatic action to prevent
possible collisions. Responsibility for the safe operation of the vehicle remains with
the driver.
车道变更决策辅助系统(LCDAS)警告驾驶员可能因换道机动而发生
碰撞。LCDAS旨在补充车辆的内部和外部后视镜,而不是消除这种镜
子的需要。LCDAS旨在检测车辆的后方和侧面(见图1)。当主体车辆
驾驶员指示希望进行车道改变时,系统评估该情况,并且如果不建议改
变车道,则警告驾驶员。LCDAS并不意味着鼓励积极的驾驶。 没有警
告并不能保证驾驶员可以安全地进行换道机动。系统不会采取任何自动
行动来防止可能的冲突。 驾驶员对车辆的安全操作负责。
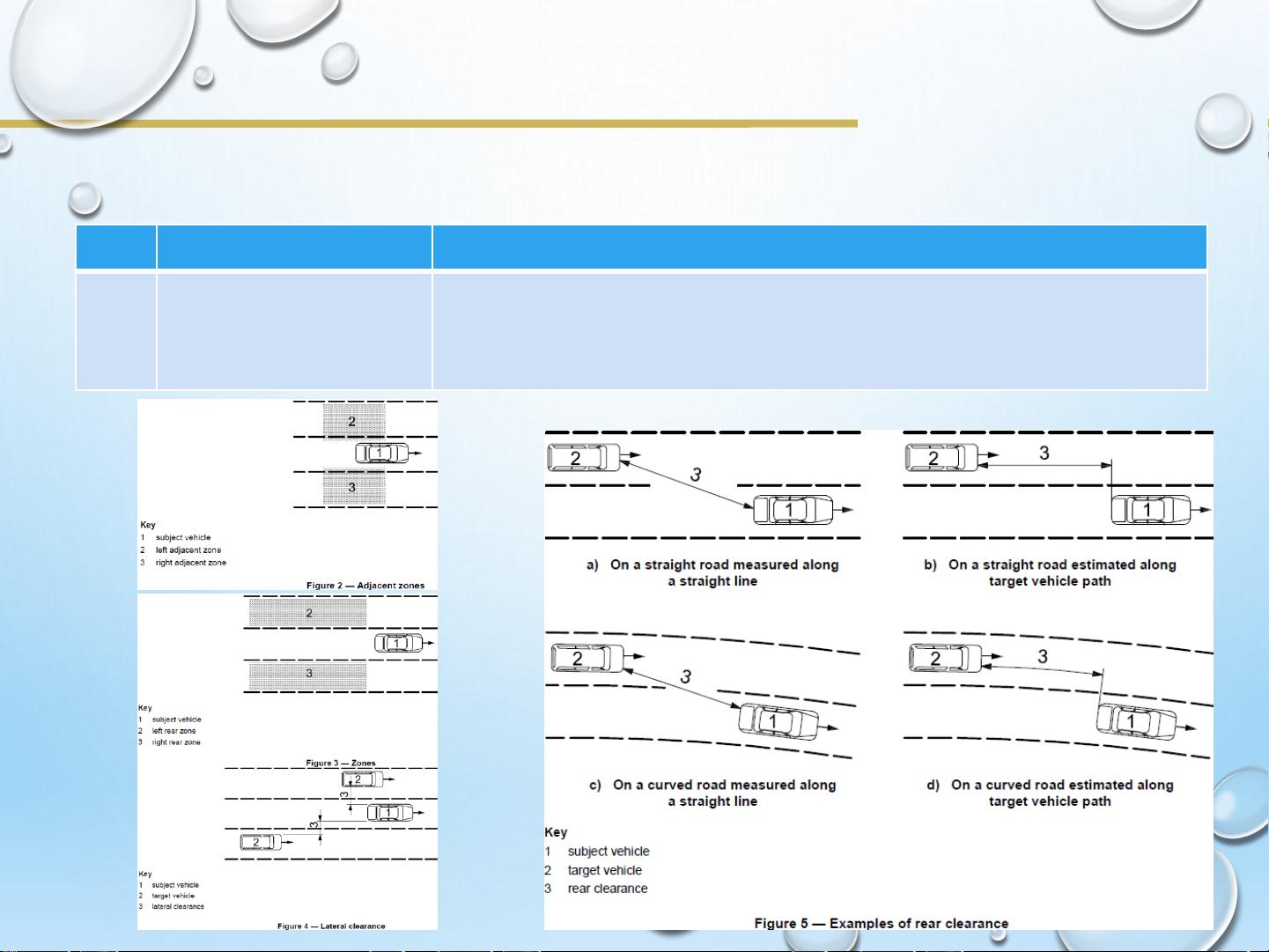
Note Many figures in this documents show vehicle on roadways with
lane markings. This is not meant to imply that lane marking recognition
or lane detection is required for an LCDAS. The lane markings are
drawn for reference only.
本文件中的许多数字显示车道上有车道标记的车辆。这并不意味着要求
LCDAS需要车道标记识别或车道检测。车道标记仅供参考。
彭小权
ppxx1@163.com