基于内模原理的PID控制器参数整定仿真实验.pdf
版权申诉
134 浏览量
2023-05-19
13:12:49
上传
评论
收藏 903KB PDF 举报

基于内模原理的 PID 控制器参数整定仿真实验
基于内模原理的 PID 控制器参数整定仿真实验
1. 内模控制
内模控制器(IMC)就是内部模型控制器(Internal model controller)的简称,由控
制器与滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,
后者影响系统的鲁棒性。它就是一种实用性很强的控制方法 ,其主要特点就是结
构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。特别就是对
于鲁棒及抗扰性的改善与大时滞系统的控制 ,效果尤为显著。因此自从其产生以
来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得
了比 PID 更为优越的效果。IMC 设计简单、跟踪性能好、鲁棒性强,能消除不可
测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 就是
一种基于过程数学模型进行控制器设计的新型控制策略。其设计简单、控制性能
良好, 易于在线分析。它不仅就是一种实用的先进控制算法, 而且就是研究预测
控制等基于模型的控制策略的重要理论基础 , 也就是提高常规控制系统设计水
平的有力工具。
值得注意的就是,目前已经证明,已成功应用于大量工业过程的各类预测控制
算法本质上都属于 IMC 类,在其等效的 IMC 结构中特殊之处只就是其给定输入采
用了未来的超前值 (预检控制系统 ),这不仅可以从结构上说明预测控制为何具有
良好的性能,而且为其进一步的深入分析与改进提供了有力的工具。
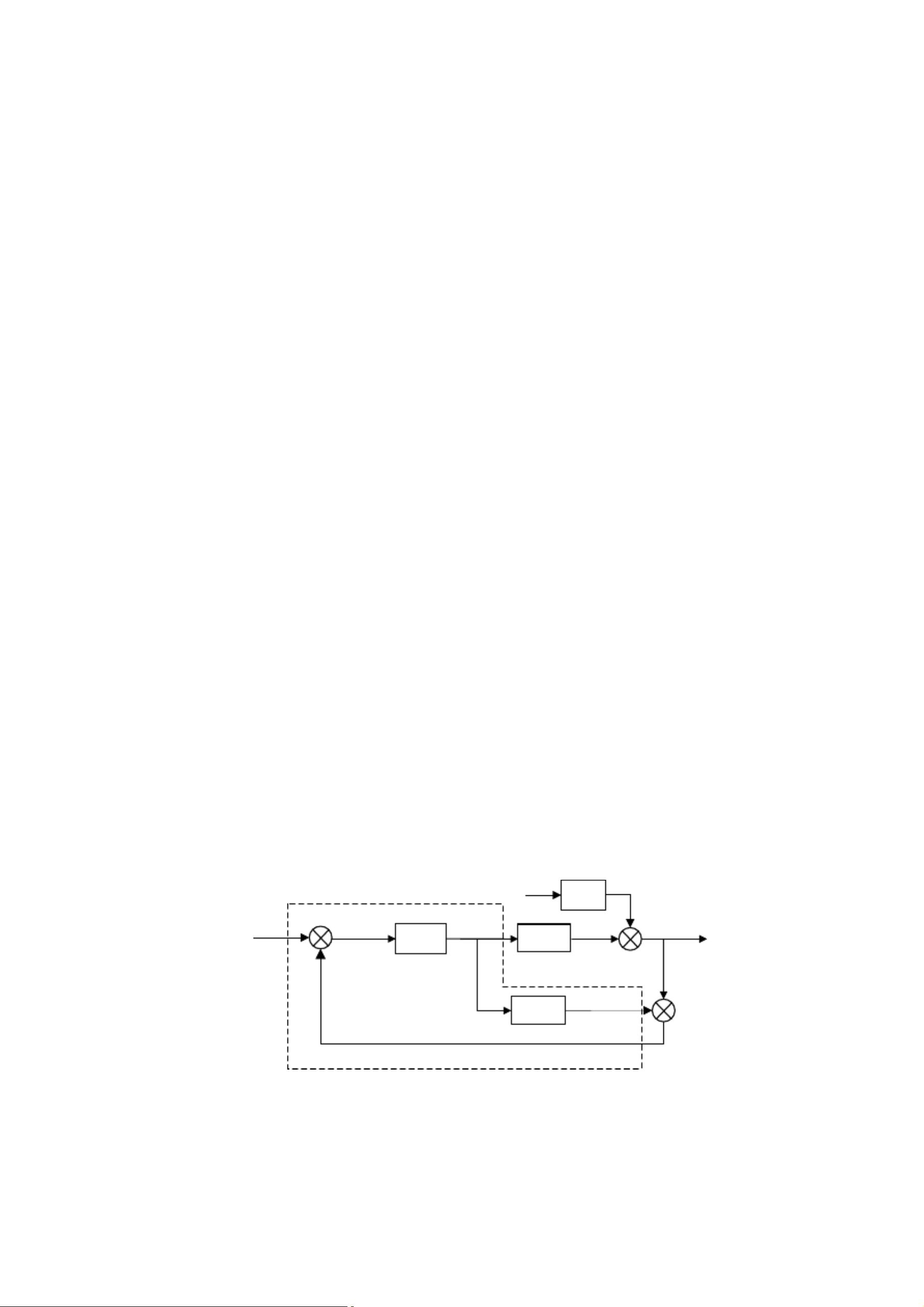
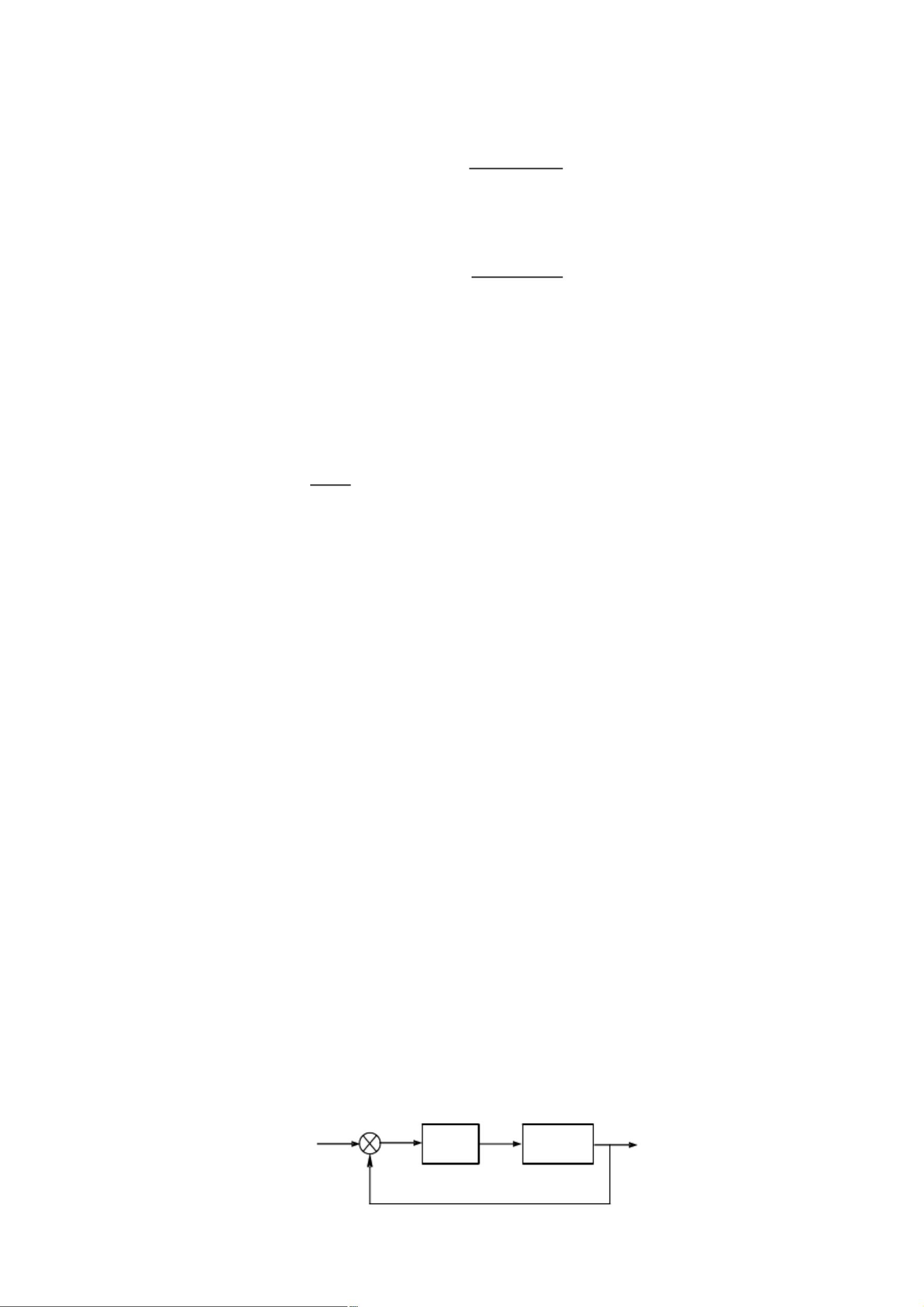
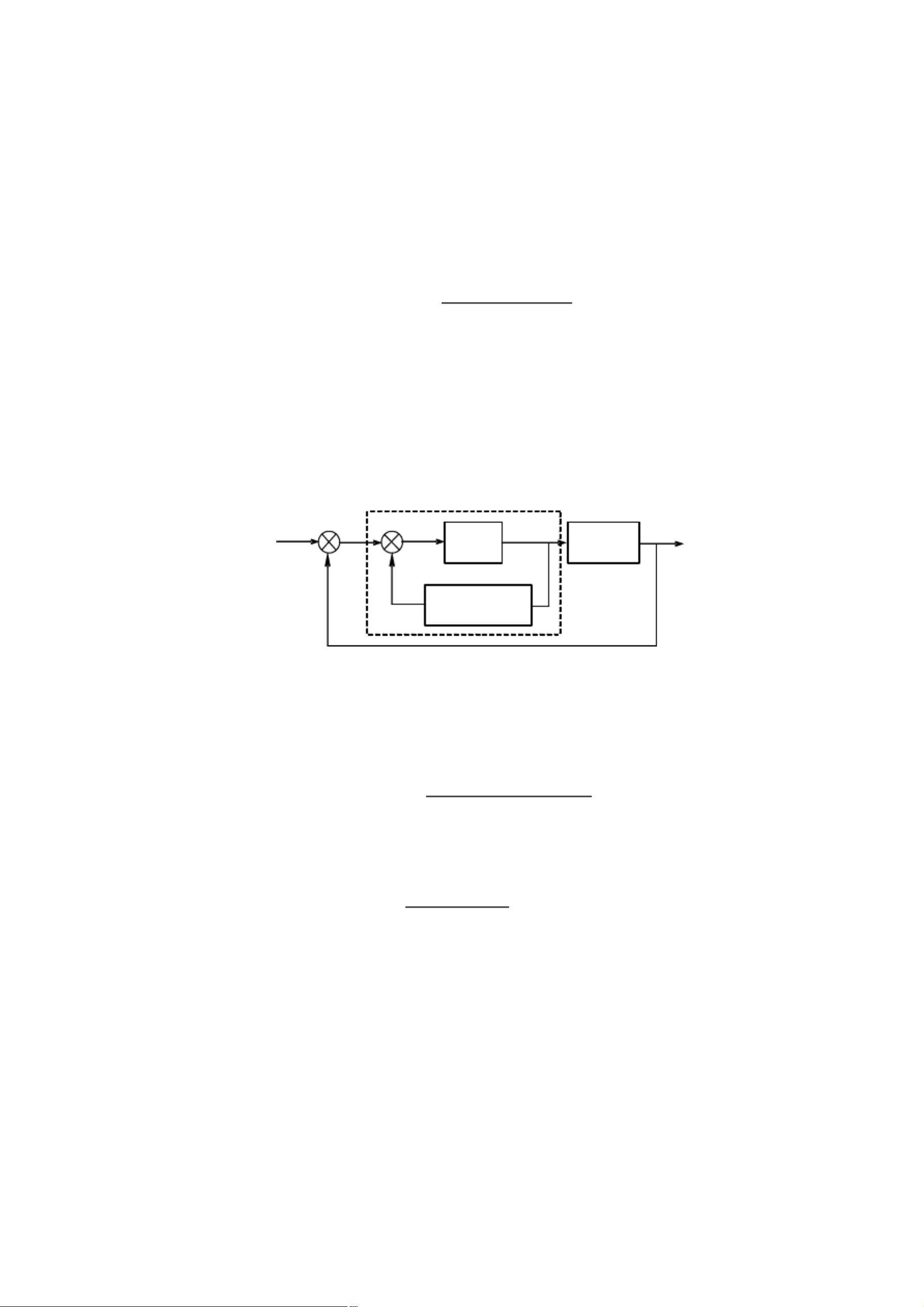
内模控制的结构框图如图 1:
d
r
+
-
+
-
G
d
G
p
+
+
y
G
IMC
u
G
m
图 1-1 内模控制的结构图
其中,
G
IMC
—内模控制器;
G
p
—实际被控过程对象;
G
m
—被控过程的数学模型;

剩余15页未读,继续阅读
资源评论













