

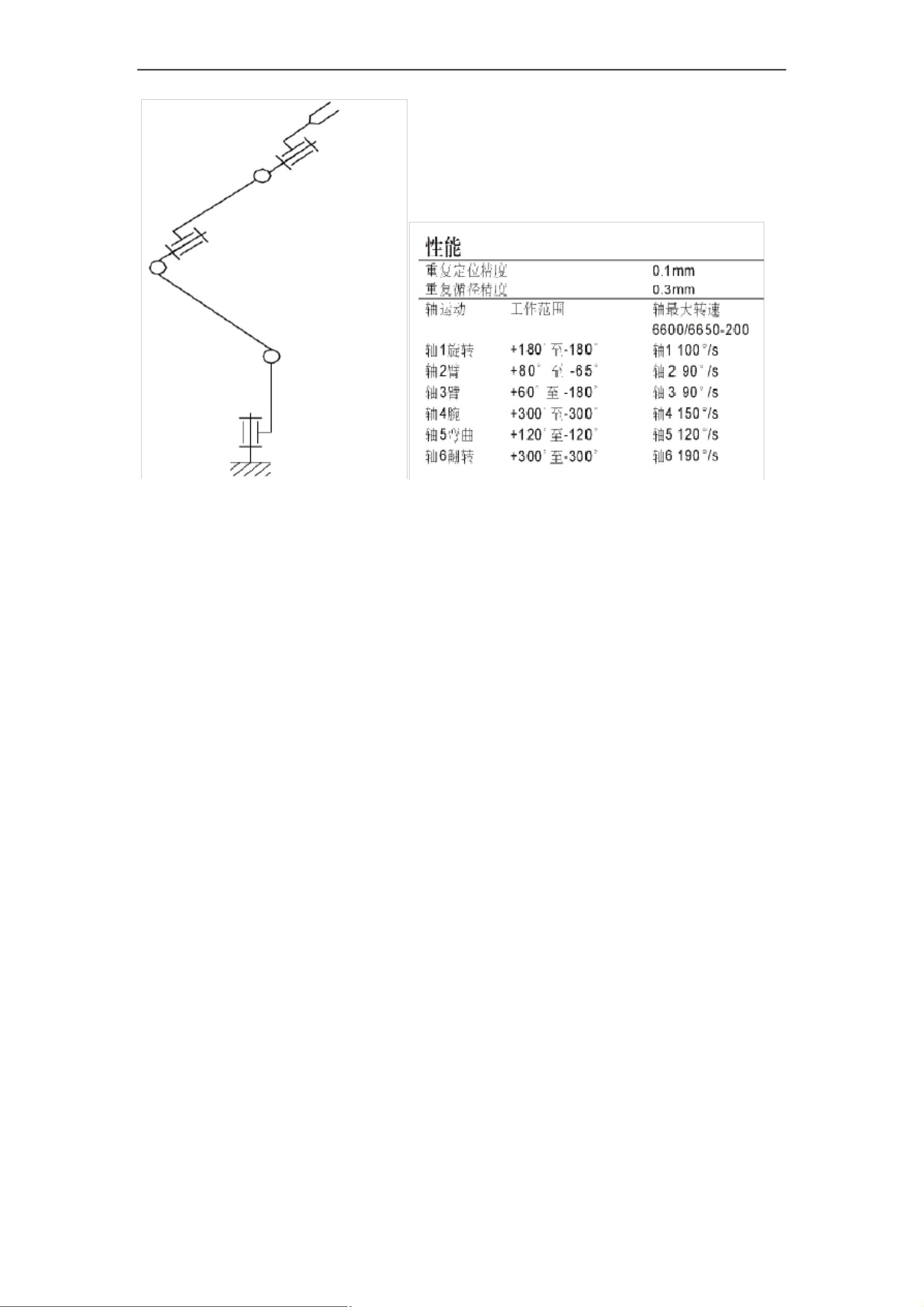
ABB IRB 6600 工业机器人运动学
研究报告
目录
1 机器人结构简介..............................................................................................................................................1
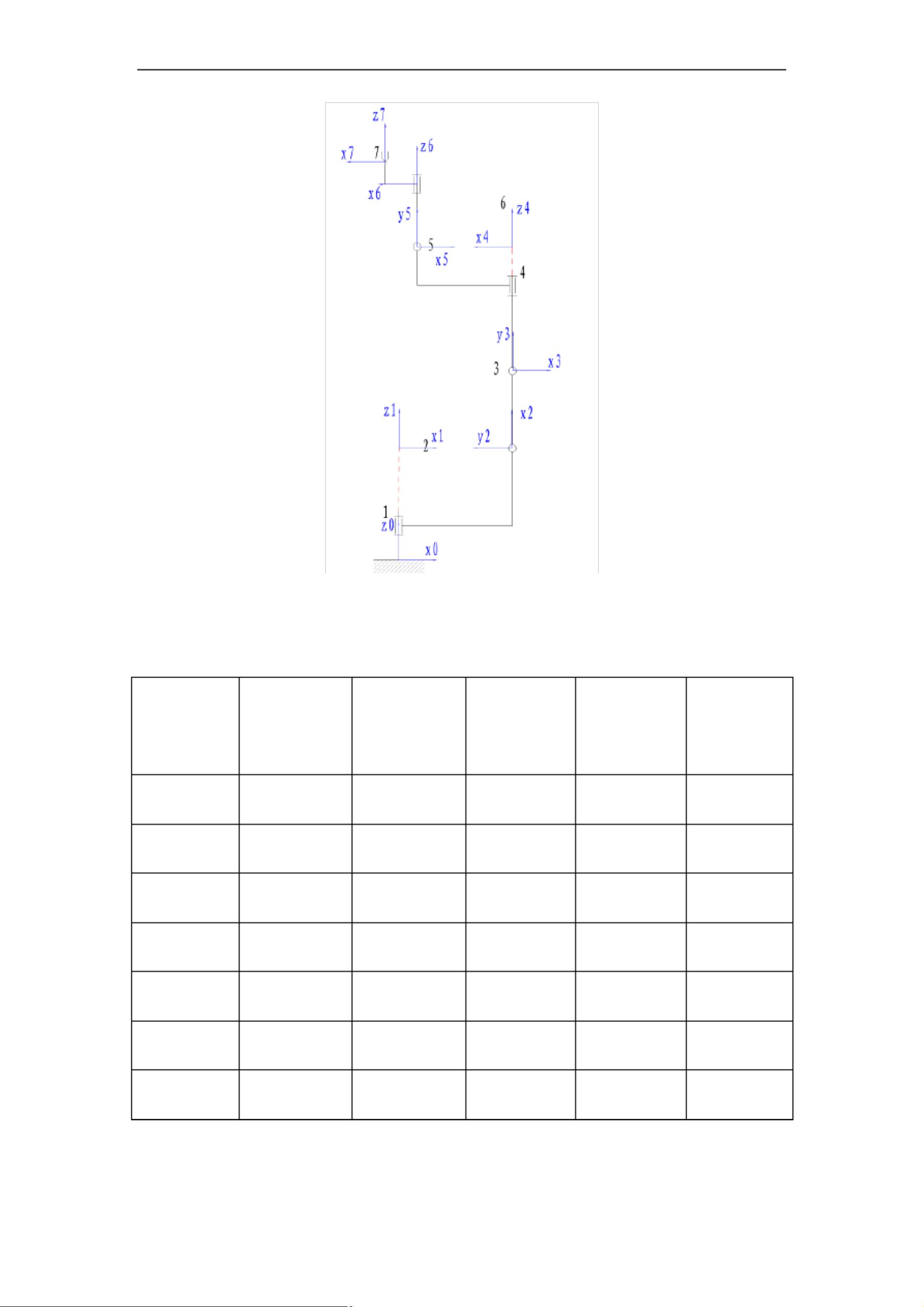
2 机器人的运动学..............................................................................................................................................2
2.1、机器人正运动学..............................................................................................................................2
2.2、机器人逆运动学............................................................................................................................10
2.2.1 求各关节到末端的坐标变换矩阵..................................................................................10
2.2.2 求 Jacobian 矩阵各列........................................................................................................14


剩余20页未读,继续阅读
资源评论













