基于高阶环路的高动态GPS基带信号处理器设计.pdf
版权申诉
70 浏览量
2023-04-27
12:58:34
上传
评论
收藏 627KB PDF 举报


基于高阶环路的高动态 GPS 基带信号处理器设计
摘要:当接收机和卫星之间相对动态较小,即在低多普勒频移和低多普勒加速度环境下,
传统的 GPS 接收机能正常工作。但是,在高动态环境下,传统的接收机不再能够跟踪信号,
会导致 GPS 卫星的位置,速度和时间失锁。一般而言,传统接收机中的多普勒平移为
7KHz
,
多普勒加速度为
1Hz / s
,然而高动态环境下,多普勒频移扩展到
25KHz
,多普勒加速度
增加到大约
100Hz / s
。因此,在高动态环境下开发接收信号算法成了一项具有挑战性的任
务。为了解决这个问题,本篇论文介绍了一种新型高阶锁频环(FLL)辅助锁相环(PLL)技术。
二阶 FLL 通过频率频率牵引降低锁定时间,从而减少高动态环境下接收机的频率误差,使得
三阶 PLL 能够更加精确地锁定高速变化的信号相位。该算法用 Matlab/Simulink 仿真并用模
拟数据进行评估。结果表明,在输入信号大范围动态变化时,使用高阶环路算法有很大改进。
关键词:基带处理器,GPS,高动态,高阶环路
1. 引言
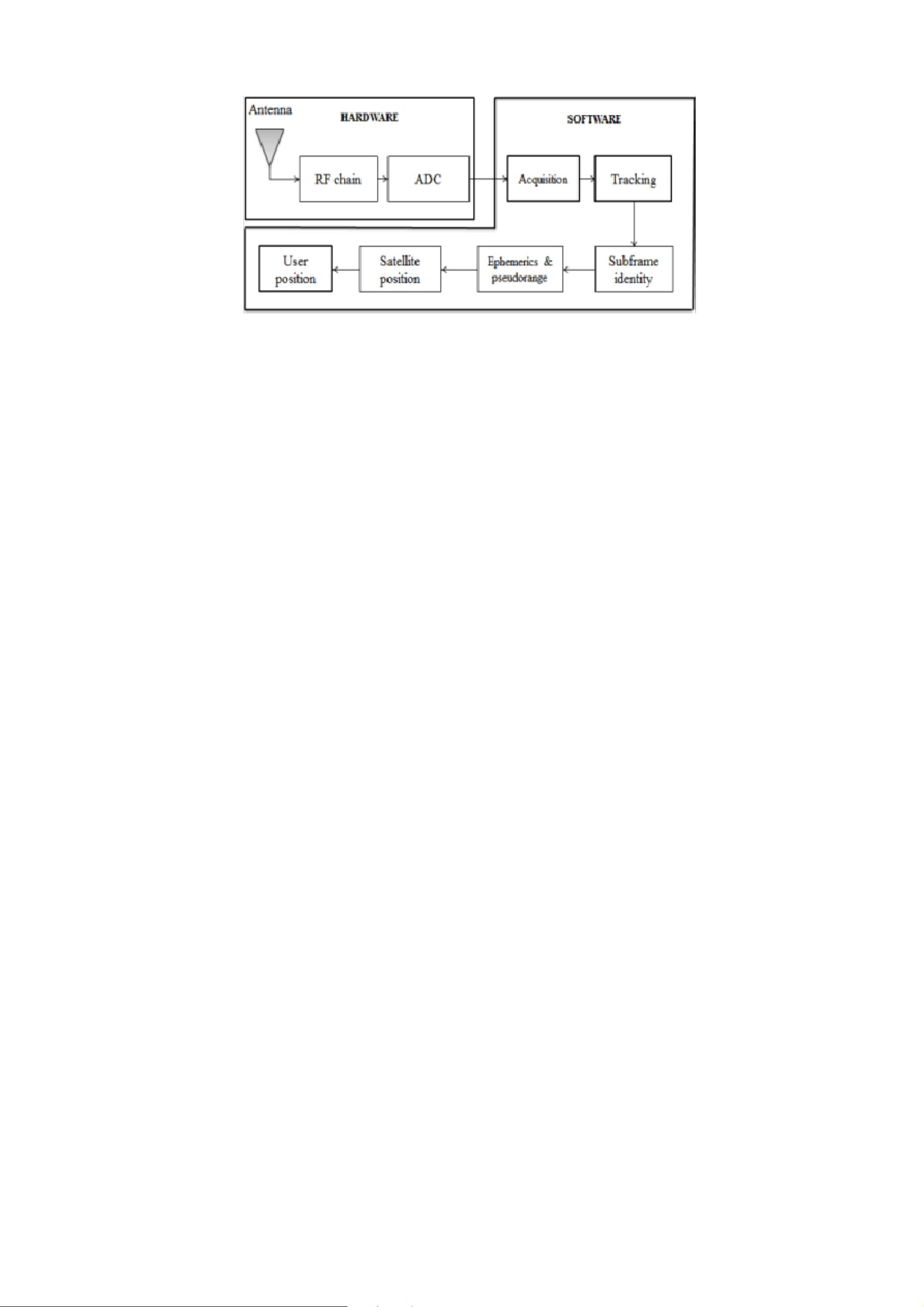
美国太空无线电导航系统称为全球定位系统(GPS),它为军用和民用用户提供了实时导
航、定位和定时服务。位置、三维坐标中的速度和用户接收机的时间是三个从 GPS 接收机中
获得的重要参数。在传统 GPS 系统中,所有的卫星通过两个频率进行广播,
L1
信号用
1.57542GHz
收发,
L2
信号用
1.2276GHz
收发。在 GPS 中,我们利用 CDMA 扩频技术进行
卫星通信,每个卫星都利用互相独立的高速伪随机(PRN)序列对低比特率的信息数据进行编
码,在接收端以 20ms 每数据位展开。通过解调数据,利用伪距和三角伪距,接收机能够提
供位置,速度和时间等信息。
然而,GPS 接收机是依靠电磁信号与卫星进行通信,更加容易受到无线干扰。像房屋树
木这样的障碍物能够反射信号,从而导致在GPS 屏幕上会有100 英尺的漂移。它不能在室内、
水下、隧道、地铁和大城市工作,因为在这些地方很少能连续地保持与卫星的无线连接。GPS
的另一个缺点就是提供全球覆盖的 GPS 信号不能均匀平等的分布在各个区域。GPS 卫星轨道
与赤道呈 55°夹角,使其更好地覆盖了美国和大多数大洲地区,却很少覆盖了北部和南部
高维度地区。斯堪的纳维亚、加拿大和俄罗斯的北部就受到影响。
此外,高速运动的汽车等物体产生的多普勒频移和多普勒加速度快速变化的现象也会使
得接收机工作失败。对于固定的接收机而言,其多普勒频移为
7KHz
,但在高动态接收机
中其多普勒频移扩大到
100KHz
,使得 GPS 信号不总是精确的。
剩余10页未读,继续阅读
资源评论


hhappy0123456789
- 粉丝: 64
- 资源: 5万+











