卡尔曼滤波课程,文字实录。
需积分: 0 134 浏览量
2022-02-28
17:26:33
上传
评论
收藏 2.68MB DOCX 举报

好,我们上课啊。今天我们要学习新的内容。ok,今天我们要学习 kalman 滤波器。那么,在信号
处理的发展史上,kalman 滤波器无论如何也是要占据一个地位的。从信号处理的整个历史来看,我们发
现 kalman 滤波器在很多角度上都会成为一个里程碑。在 kalman 滤波器出现之前啊,人们对问题的处理
还处在一个相对比较初级和基本的层面。而 kalman 滤波器的出现,应该说开启了很多扇大门,能够让人
们对于信号处理产生了全新的认识,我们今天的上课程是希望大家从两个层面可以有所收获,第一希望大
家能够领会两种思想。『我们总是说,我们这个每一堂课都希望能够大让大家去领会思想』,那么今天我
们希望大家领会两种思想。
第二个层面呢?我们希望能能让大家体会到啊,即使是非常复杂的、表面上非常复杂的一些对象或
者一些方法。那么,它本质的实际的规律其实都是很简单的。希望大家能够通过今天的课程的学习可以有
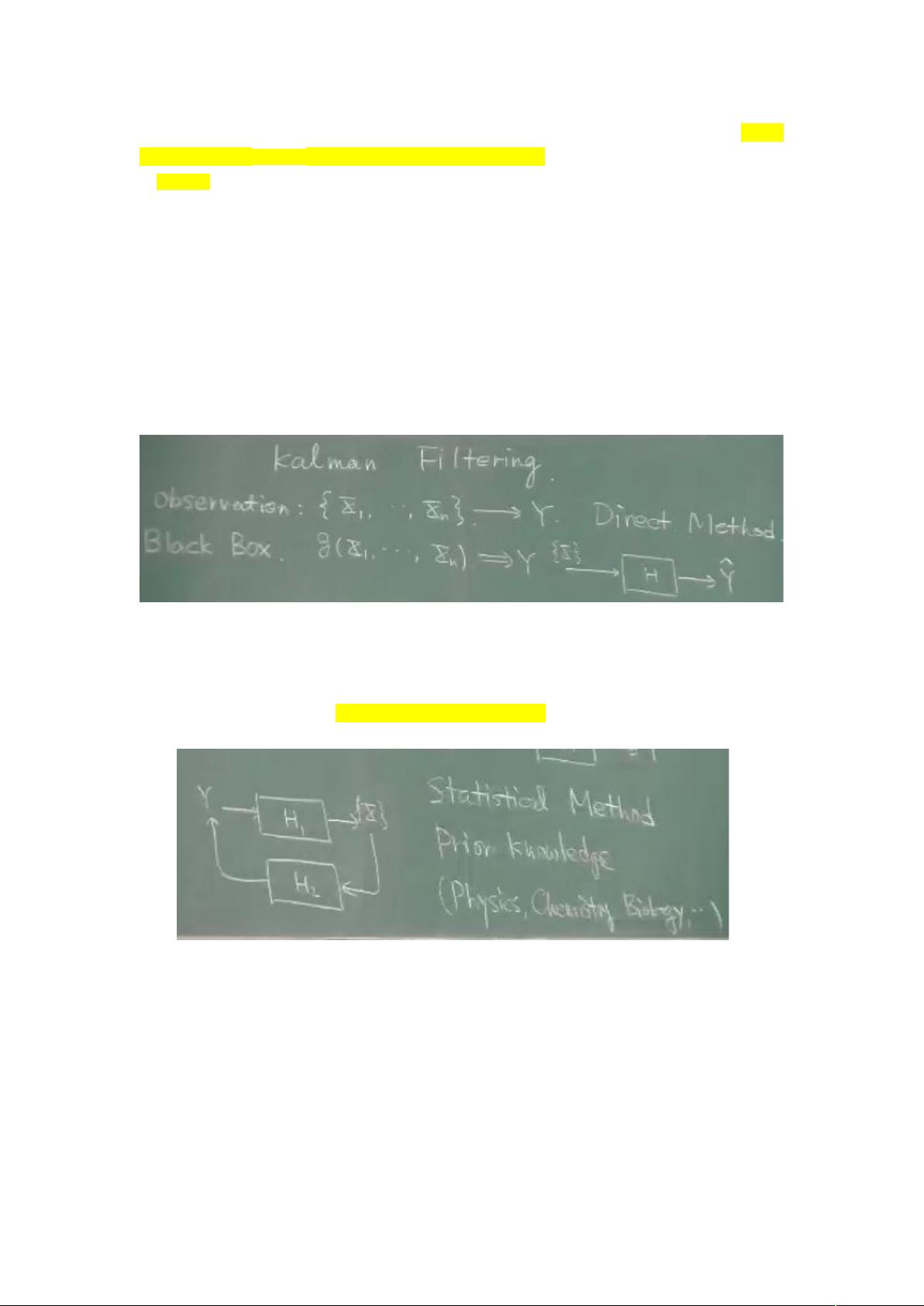
所体会好,现在我们就开始。我们的信号处理要做的事情啊是从观测开始入手,我们的观测往往是一组随
机变量,观测是一组随机变量
{X
1
, … X
N
}
。那么我们希望能够构造一种处理方法去估计另一个随机变
量 Y。没有问题,以前我们所学到的估计的方法,无论是线性的也好是非线性的也好,我们往往对线性的
模式给予更多的关注的,因为线性的处理起来比较方便,他们都属于一种直接的方法,怎么叫直接呢。
就是我们试图去构造一个映射 g。或者说去构造一个估计 g,直接把我们的观测数据
{X
1
, … X
N
}
给用上。然后让这个估计
g {X
1
, … X
N
}
能够在某种意义上去逼近我们想要看的东西 Y,因此呢,我们就
会构造一个滤波器 H。这个滤波器的输入
{X
1
, … X
N
}
就是我们的观测经过一个滤波 H。直接就得到了
输出 Y,而输出 Y 我们认为就是我们试图去估计的那个对象的某种近似值,没问题。这是我们从开学到现
在为止一直在秉承的基本理念,维纳滤波就是最优的这种线性逼近。好了,这样一种思想,他有什么问题?
他有什么问题。
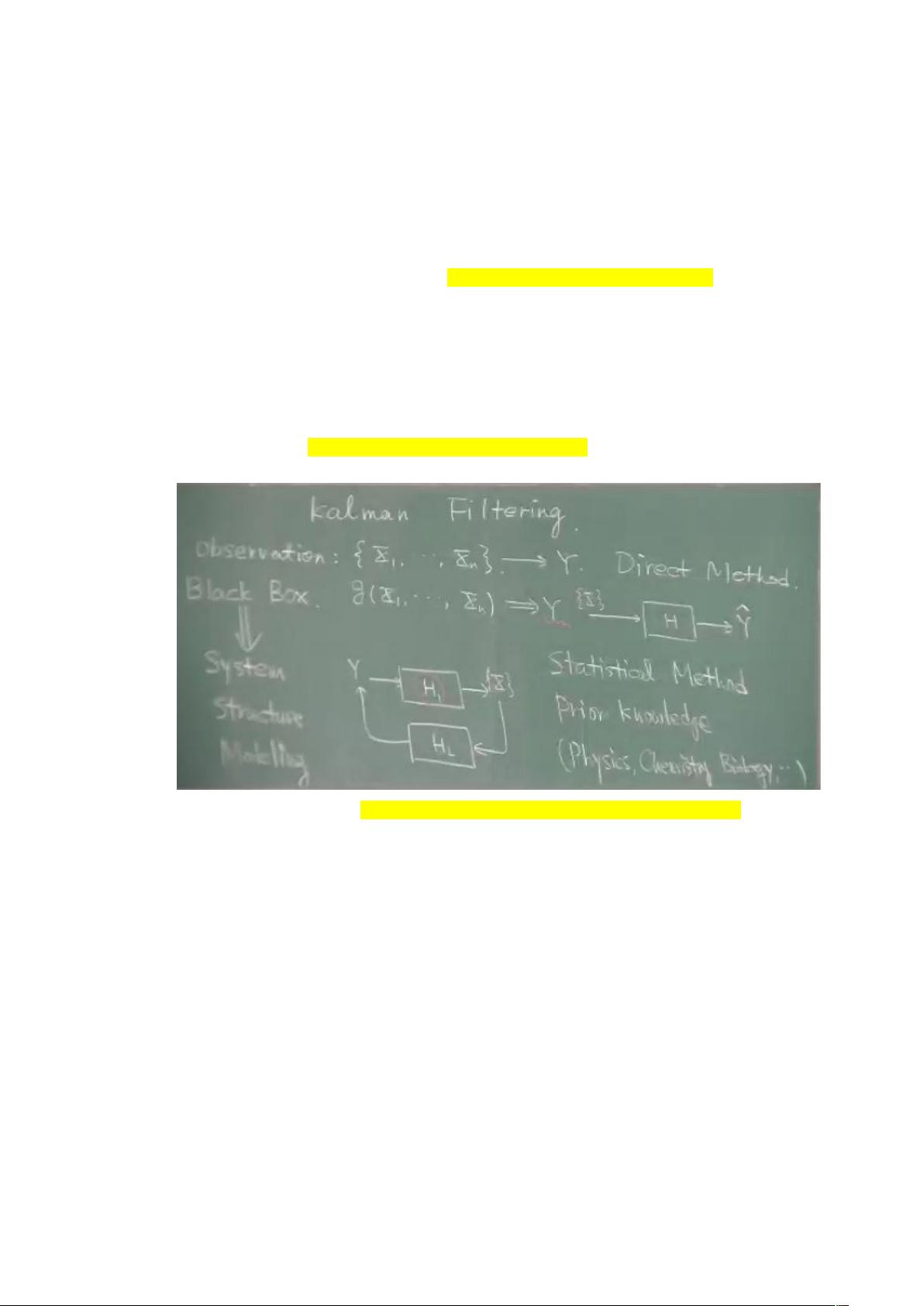
这样一种思想啊,本质上来讲它是一个黑箱的思想。怎么讲呢?我这个时候有观测,但这个观测他
是怎么来的,我不是很在意。总之,我就观测到他了,而我要估计的东西呢。在这里,这个估计的这个东
西 Y,他一定是在某种程度上会影响这个观测,当然会影响。这两者 XY 之间如果根本没有相关性,我们
怎么能从观测 X 得到这个估计 Y 的对象的。他一定是有相关性的,那么这个估计的对象 Y 他对于我观测 X
是如何再发生影响和作用,其实我们没有关注。不知大家注意到没有,我们并没有去深究这件事,我们只
知道。他们之间是有关系的,肯定是有关系的,而我们所做的事情呢。是把他们中间的这种关系看成一个
黑箱,这个黑箱我就不打开了。然后我就紧紧从输入端处两个端入手来构造。我的信号处理方法,换句话
讲,我们现在是这么一个逻辑。
如果我们认真的画一下这个图的话,原本这里有个 Y。它会产生出我们的一组观测
{X
1
, … X
N
}
,
这是一个系统 H1,这个系统 H1 究竟是怎么一回事。其实我们并不知道,我们不但是不知道,我们甚至

剩余18页未读,继续阅读
资源评论













