
3 目录
1 产品特点 ............................................................................... 1
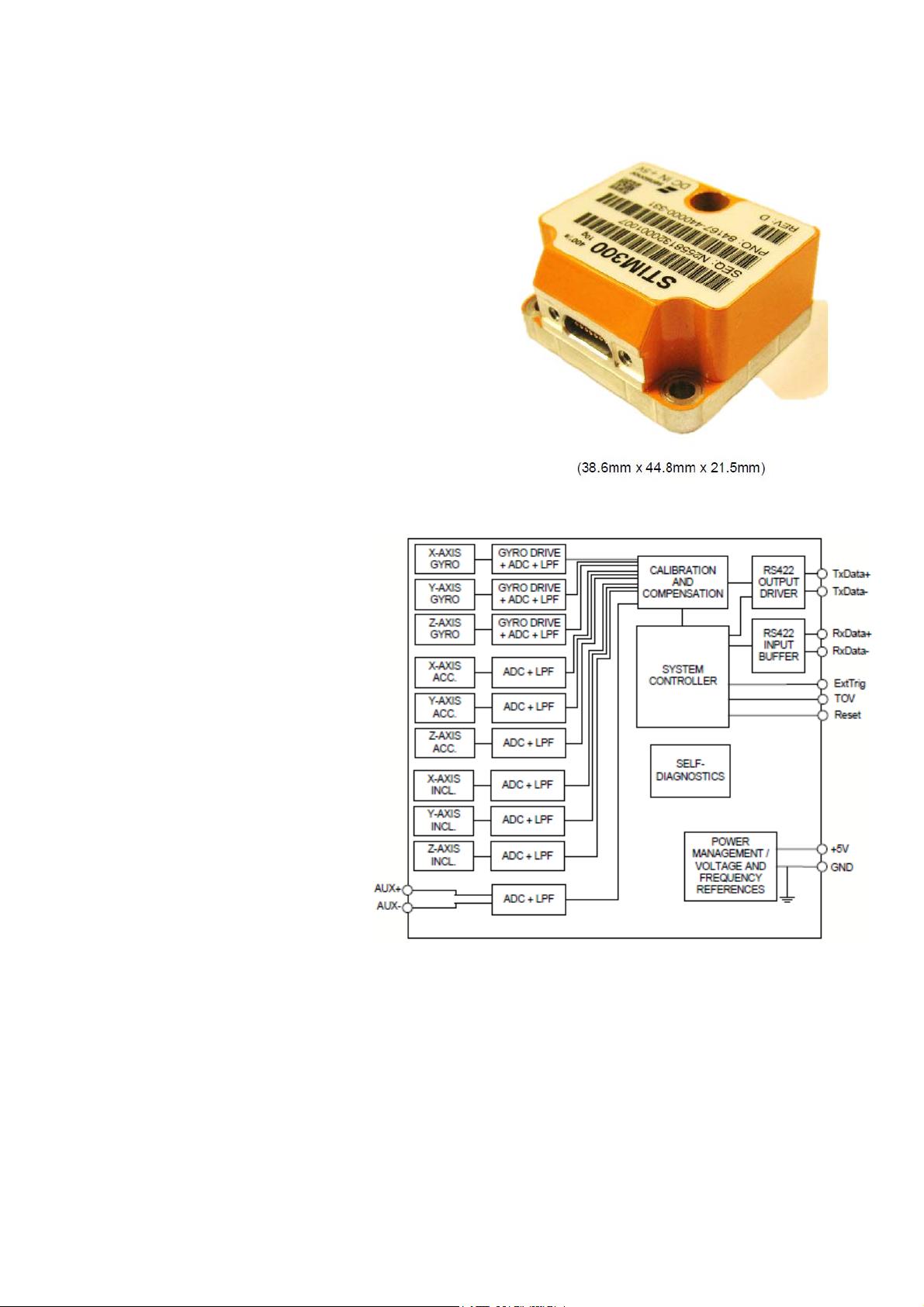
2 概述 ................................................................................... 1
3 目录 ................................................................................... 2
4.1 定义 ............................................................................. 3
4.2 缩略语 ........................................................................... 3
5 绝对最大额定值 ......................................................................... 3
6 规格 ................................................................................... 4
6.1 典型性能特性 ..................................................................... 9
6.1.1 陀螺仪特性 ................................................................ 9
6.1.2 加速度计特点 ............................................................. 13
6.1.3 测斜仪特性 ............................................................... 16
6.1.4 AUX 特性 .................................................................. 19
6.2 配置参数 ........................................................................ 21
6.3 数据包规格 ...................................................................... 22
6.3.1 零件编号数据报 ........................................................... 22
6.3.2 序列号数据报 ............................................................. 23
6.3.3 配置数据报 ............................................................... 24
6.3.4 标准模式下数据包 ......................................................... 27
6.3.5 循环冗余校验(CRC) ...................................................... 28
6.4 状态字节 ........................................................................ 29
7 机械 .................................................................................. 30
7.1 机械尺寸 ........................................................................ 30
7.2 管脚配置 ........................................................................ 31
7.3 轴的定义 ........................................................................ 31
8.1 复位 ............................................................................ 32
8.2 外部触发 ........................................................................ 32
8.3 有效时间(TOV) ................................................................. 33
8.4 辅助输入 ........................................................................ 34
8.5 操作模式 ...............................................................
......... 34
8.5.1 初始化模式 ............................................................... 35
8.5.2 标准模式 ................................................................. 35
8.5.3 服务模式 ................................................................. 42
9 标准模式下的命令 ...................................................................... 43
9.1 N (PART NUMBER DATAGRAM) 命令 ................................................... 43
9.2 I (SERIAL NUMBER DATAGRAM) 命令 ................................................. 43
9.3 C (CONFIGURATION DATAGRAM) 命令 ................................................. 43
9.4 R (RESET) 命令 .................................................................. 44
9.5 服务模式命令 .................................................................... 44
10 在服务模式下的命令 ................................................................... 46
10.1 i (INFORMATION) 命令 .......................................................... 47
10.2 a (SINGLE-SHOT MEASUREMENT) 命令 ............................................... 52
10.3 c (DIAGNOSTIC) 命令 ........................................................... 54
10.4 d (DATAGRAM FORMAT) 命令 ....................................................... 56
10.5 t (TRANSMISSION PARAMETERS) 命令 ............................................... 58
10.5.1 用户定义比特率 .......................................................... 58
10.6 r (LINE TERMINATION) 命令 ...................................................... 60
10.7 u (OUTPUT UNIT) 命令 ........................................................... 61
10.8 f (LP FILTER -3dB FREQUENCY) 命令 .............................................. 62
10.9 m (SAMPLE RATE) 命令 ........................................................... 64
10.10 k (AUX COMP) 命令 ............................................................. 65
10.11 g (GYRO G-COMP) 命令 .......................................................... 66
10.12 s (SAVE) 命令 ................................................................. 69
10.13 x (EXIT) 命令 ................................................................. 70
10.14 z (RESTORE TO FACTORY SETTINGS) 命令 .......................................... 72
10.15 ? (HELP) 命令 ................................................................. 73
11 标识 ................................................................................. 78
12 配置/订购信息 ........................................................................ 79


 甜甜不加糖2023-07-25这份中文手册详细介绍了挪威STIM300惯性测量组合的性能和功能,对于需要了解该产品的用户,非常实用。
甜甜不加糖2023-07-25这份中文手册详细介绍了挪威STIM300惯性测量组合的性能和功能,对于需要了解该产品的用户,非常实用。 吉利吉利2023-07-25对于初次接触这个产品的人来说,手册提供了良好的引导和使用说明,有助于快速上手和使用体验。
吉利吉利2023-07-25对于初次接触这个产品的人来说,手册提供了良好的引导和使用说明,有助于快速上手和使用体验。 月小烟2023-07-25手册中的信息丰富而简洁,用词质朴,让人容易理解其中的技术原理和操作步骤。
月小烟2023-07-25手册中的信息丰富而简洁,用词质朴,让人容易理解其中的技术原理和操作步骤。 精准小天使2023-07-25该文件给出了清晰的介绍和示例,不仅可以作为产品的参考手册,也能帮助用户解决常见问题。
精准小天使2023-07-25该文件给出了清晰的介绍和示例,不仅可以作为产品的参考手册,也能帮助用户解决常见问题。 王元祺2023-07-25从整体来看,这份文件对于挪威STIM300惯性测量组合的介绍十分详细,对于提供了全面的了解和参考,是一份值得推荐的文件。
王元祺2023-07-25从整体来看,这份文件对于挪威STIM300惯性测量组合的介绍十分详细,对于提供了全面的了解和参考,是一份值得推荐的文件。











