Fig 2. Kinect 与两个 Nikon D60 SLR 相机 rig.
2. Kinect 作为一种 3D 测量设备
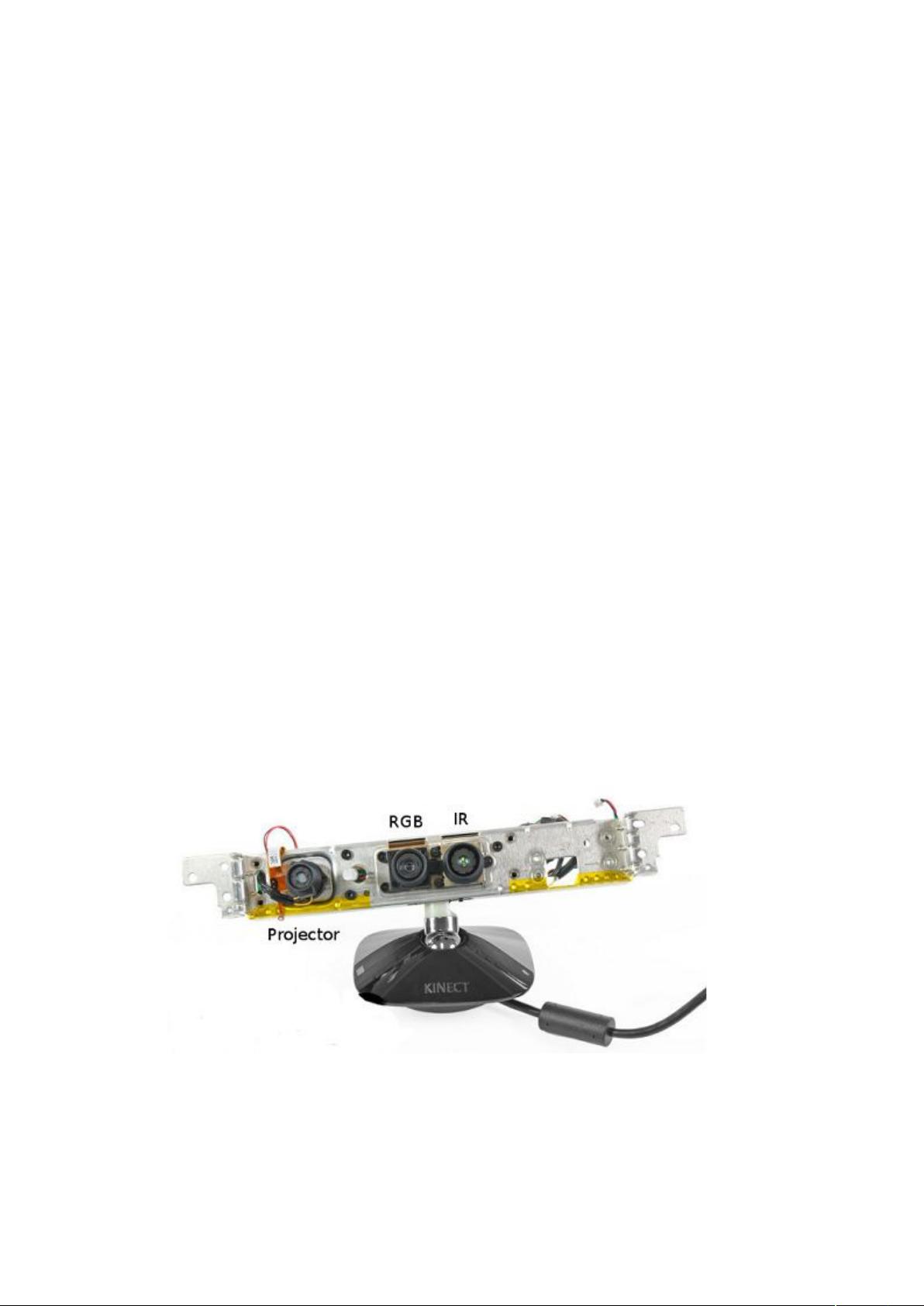
Kinect 是一种由 IR 发射器、IR 相机组成,它们能够用来对空间点做三
角测量。它能够作为一个深度相机和一个 RGB 相机使用。如图 1.作为一个
测量设备,Kinect 相机有三个输出结果:IR 图像,RGB 图像和深度图像。
2.1 IR 图像
IR(1280×1024 像素,57×45 度的视场 FOV,6.1mm 的焦距,像素
尺寸为 5.2μm)相机被用来观察和对 IR 发射模型向生成三角测量场景的过
程解码。如果由一个卤素灯【16,19】合适的照射,而且 IR 发射器被阻挡,
Fig 7(c,d)中,Kinect 就可以用 RGB 相机的棋盘格模式来可靠的进行标定。
在 Tab2 中国显示出相机的一些可忽略的径向和切向畸变。
2.2 RGB 图像
RGB(1280×1024 像素,63×50 度的视场 FOV,2.9mm 的焦距,像
素尺寸为 2.8μm)相机传送中等质量图像。它能通过【2】中的方法标定,
能通过 SfM 系统来追踪相机的移动。
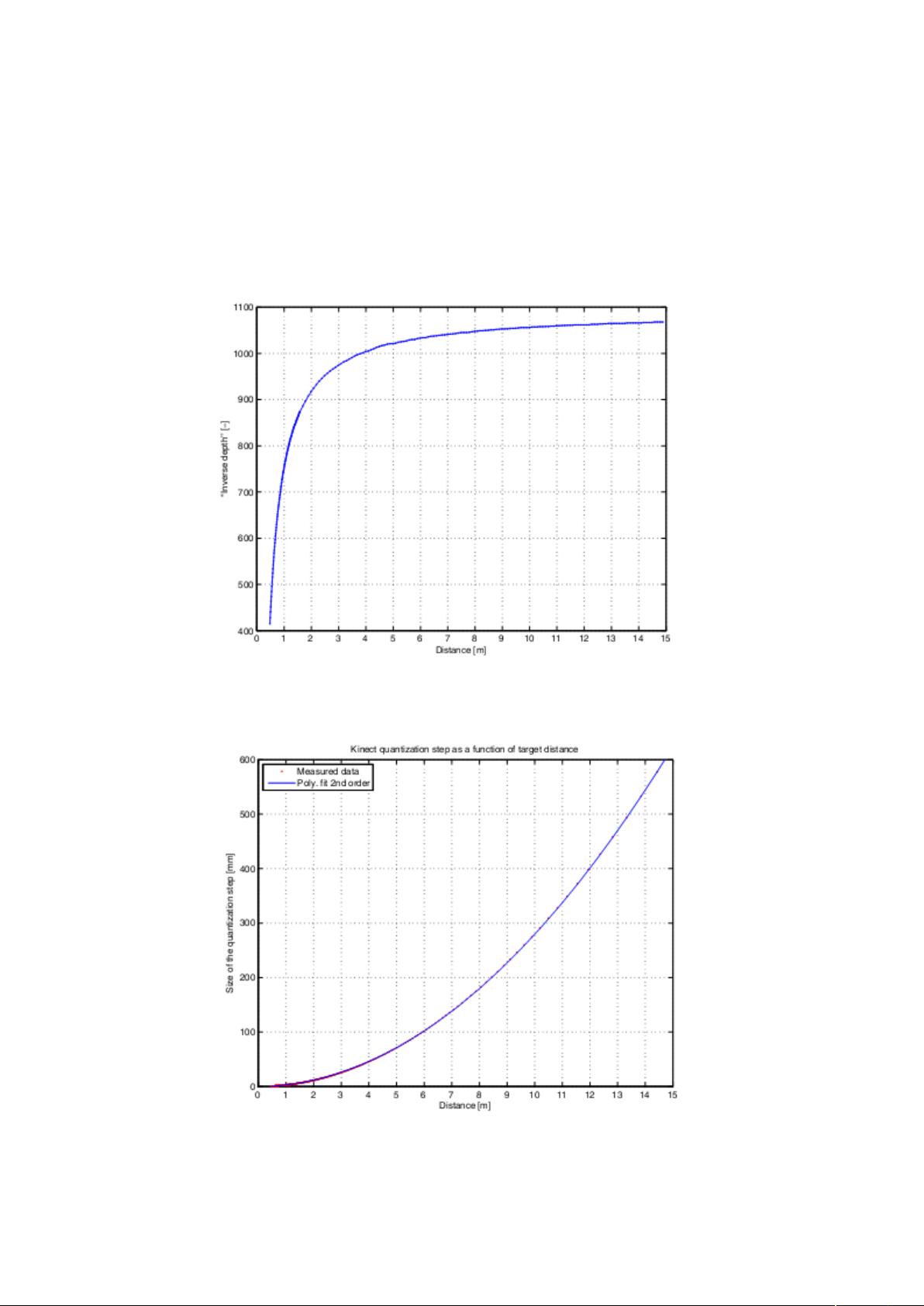
2.3 深度图形
Kinect 相机的主要原始输出是场景中相应的深度。它返回的是“逆深

















- 1
- 2
前往页