基于MSP430的巡迹打靶坦克系统设计

光源检测
键盘
红外巡迹
电机驱动 炮台控制
声光报警
基于 MSP430 的巡迹打靶坦克系统设计
摘要:本设计是基于 MSP430 微处理器的巡迹打靶坦克。系统由主控模块,红外巡迹,寻
光模块,声光报警,炮台驱动及坦克驱动以及其他相关电路构成。主控模块通过接收红外
对管返回的场地信号,经平滑滤波处理得到黑线位置,通过 PID 增量控制算法控制减速码
盘电机实现快速准确巡线,同时接收光敏器件反馈的检测电压,通过高速 采样并进行
滑动滤波处理,结合位置 算法实现光源精确跟踪。
关键词:MSP430 红外巡迹 PID 算法 光敏器件
Abstract:
!"#$!!%""&!%
%! "'!&(&(%#!
!%( % ! % $ "
"%!&)#!*$
!!!#"(+!",
(!-!!$"$&"!"
)!!&%,%$"#
Keywords: $!"(+!"
1 系统方案设计
1.1 系统硬件方案
为了实现坦克沿靶场中预先设置的轨迹快速寻迹,同时以光电方式瞄准光靶,实现激
光打靶。本设计以 MSP430 微处理器为控制核心,采用红外对管采集路况信息实现巡迹,
光敏电阻及光敏三极管检测光源并引导激光炮打靶。
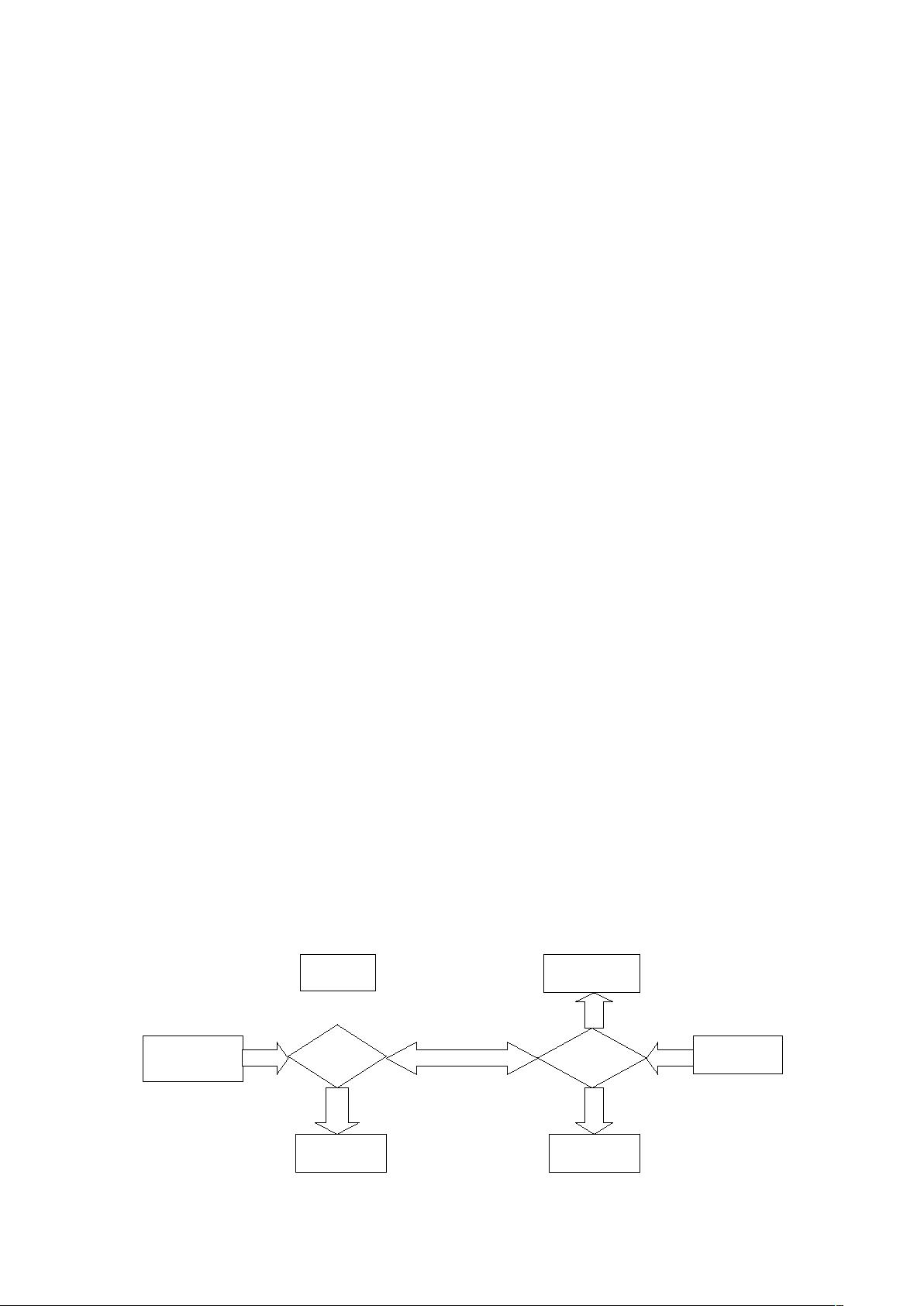
系统总框图如下:
.
串口通讯


剩余14页未读,继续阅读
资源评论

 zds9204102012-08-01骗人的,我还以为是程序。。这个百度文库有免费版!
zds9204102012-08-01骗人的,我还以为是程序。。这个百度文库有免费版! w_liqin2012-08-14没有程序啊,不值得
w_liqin2012-08-14没有程序啊,不值得- chengbbao2013-09-04有部分原理,没有程序
- ab6565652012-08-22这个不是程序,但还是有点借鉴意义的,希望下次简介写得清楚点,免得别人误会了。












