《安川机器人培训教材(二)》主要涵盖了机器人坐标系及其相关操作的深入学习,旨在帮助用户更好地理解和操控安川机器人。以下是对该教材主要内容的详细解析:
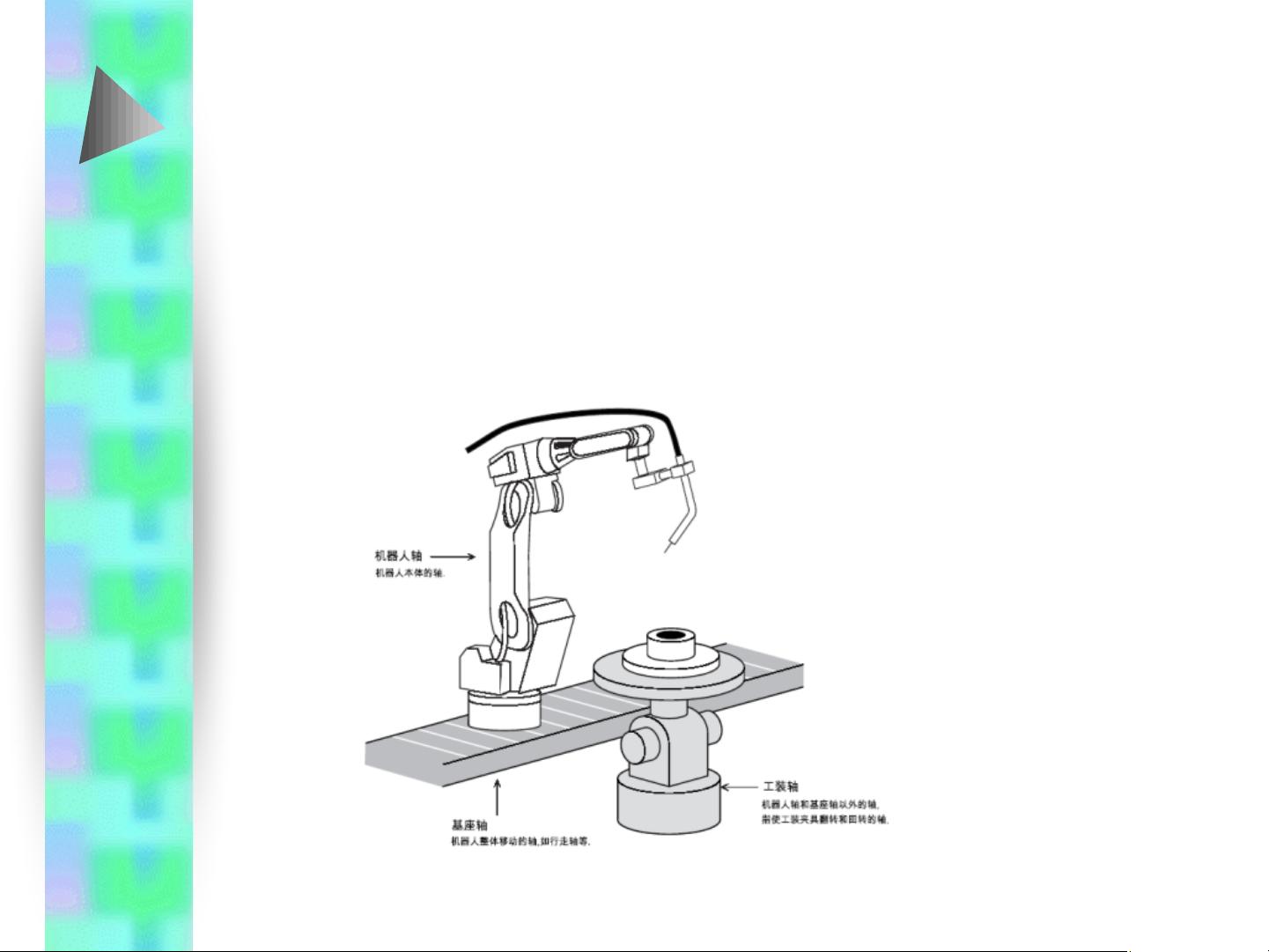
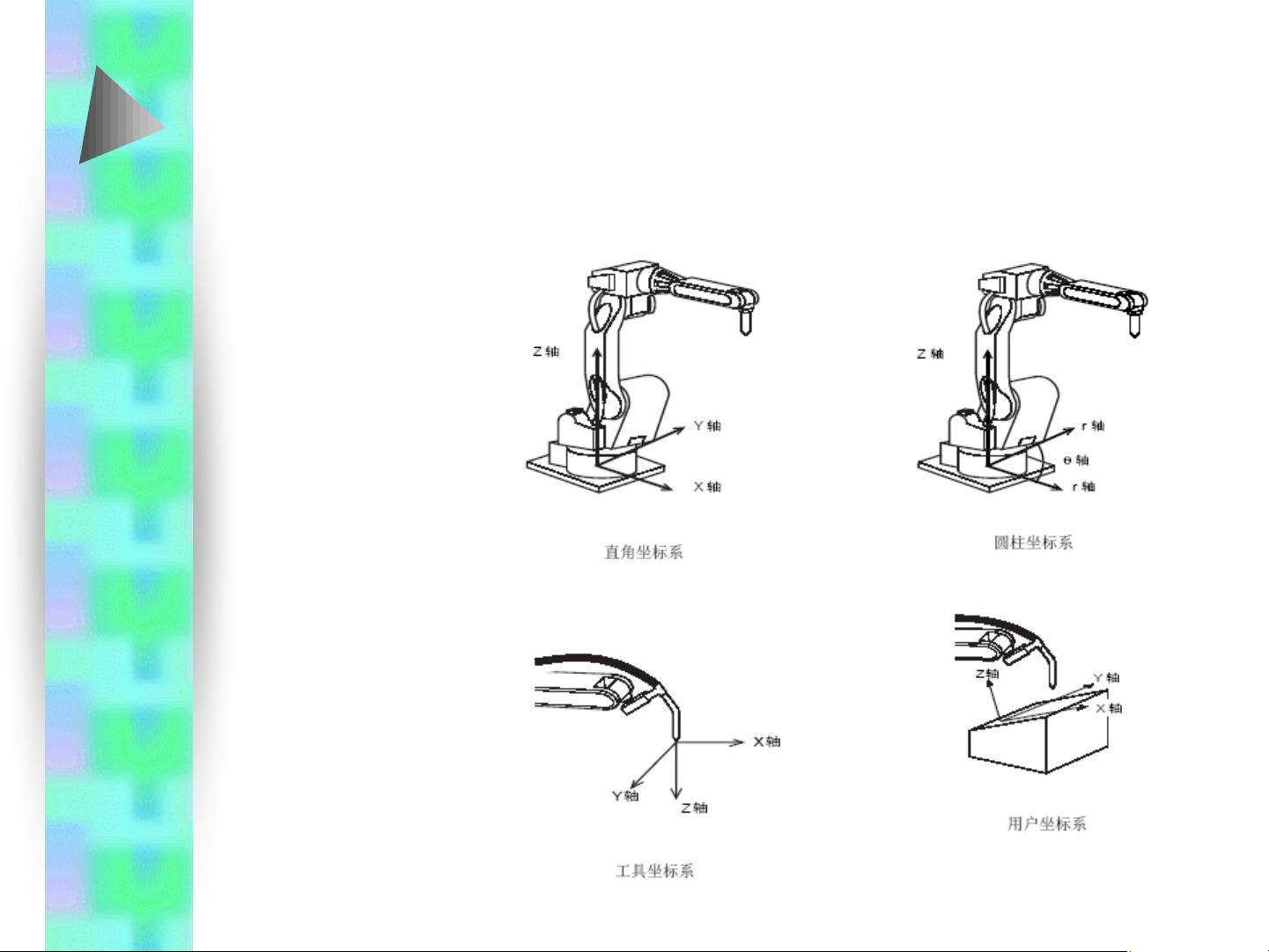
讲解了机器人轴与坐标系的关系。机器人各轴的名称是理解坐标系的基础,包括关节坐标系、直角坐标系、圆柱坐标系以及工具坐标系和用户坐标系。关节坐标系是基于机器人各个关节角度定义的,而直角坐标系则以XYZ三维空间直角坐标来表示位置,圆柱坐标系则引入了径向距离和角度的概念。工具坐标系是根据机器人手腕法兰盘上所装工具的方向定义的,其方向会随着手腕的移动而改变。用户坐标系则是根据实际工作需求自定义的坐标系统。
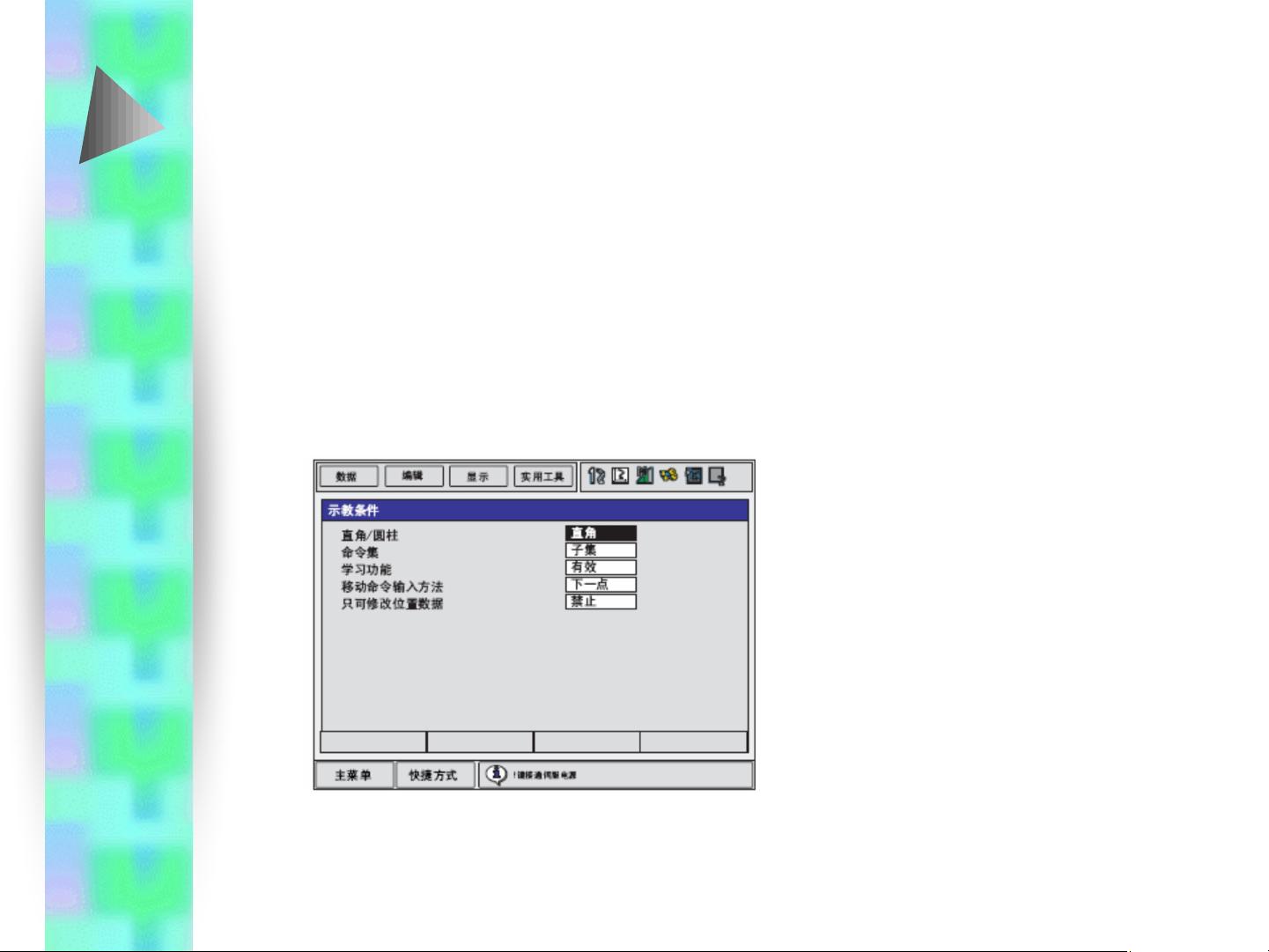
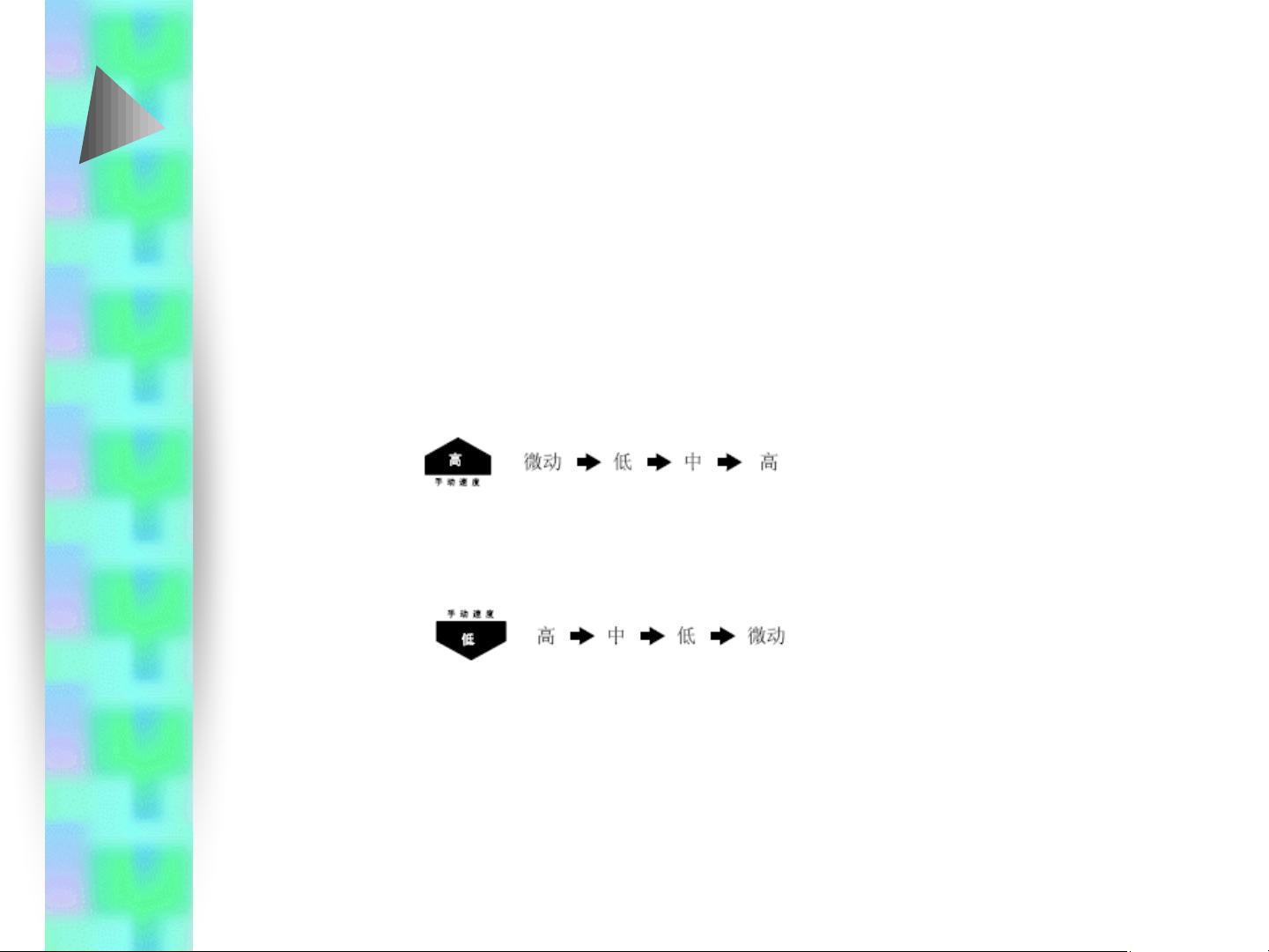
接着,教材详细介绍了基本操作,包括坐标系的选择和手动速度的选择。用户可以根据需要在关节坐标系、直角坐标系、圆柱坐标系、工具坐标系和用户坐标系之间切换。手动速度的调整允许用户以微动、低、中、高四种速度级别进行操作,便于精确控制机器人的运动。
在关节坐标系部分,用户可以学习如何通过调整各关节的角度来控制机器人的运动。直角坐标系和圆柱坐标系则让用户能更直观地理解机器人在空间中的位置和路径规划。
对于工具坐标系,教材强调了其重要性在于可以把控制点转移到工具的尖端,使得工具的移动与机器人自身的位置和姿态无关,这对于保持工具姿态恒定的平行移动操作尤其有用。同时,工具尺寸的设定也是一项关键操作,包括工具文件的登录和坐标值的输入。用户需要按照一定的步骤选择工具号,输入坐标值,并通过回车键确认。
工具校验是确保工具尺寸准确无误的一个功能,它可以通过控制点为基准示教五个不同姿态来自动计算工具控制点的位置。用户需要在主菜单中选择相应选项,然后按照提示操作机器人至所需位置并确认完成。如果需要清除校验数据,可以在数据菜单中选择清除数据功能。
控制点的确认是一个实用的操作,用户可以通过按下坐标键选择工具号,然后通过轴操作键来观察和验证控制点的实际位置。
《安川机器人培训教材(二)》提供了全面的机器人坐标系操作指南,有助于用户熟练掌握安川机器人的各种操作技巧,从而在实际应用中更加得心应手。通过学习和实践,用户将能够灵活运用这些知识来提高工作效率和精度。