

FANUC 机器人附加轴的启动步骤
1. 同时按下【PREV】和【NEXT】键,接通电源。接着选择“controlled start”;
2. 按下示教器的 MENU 菜单键,选择“9 MAINTENANCE”;
3. 出现下图所示画面;
4. 将光标指向 EXTENDED AXIS CONTROL(附加轴控制),按下 F4“手动”键,出现下
图画面。选择要设定附加轴的组,输入该号码;
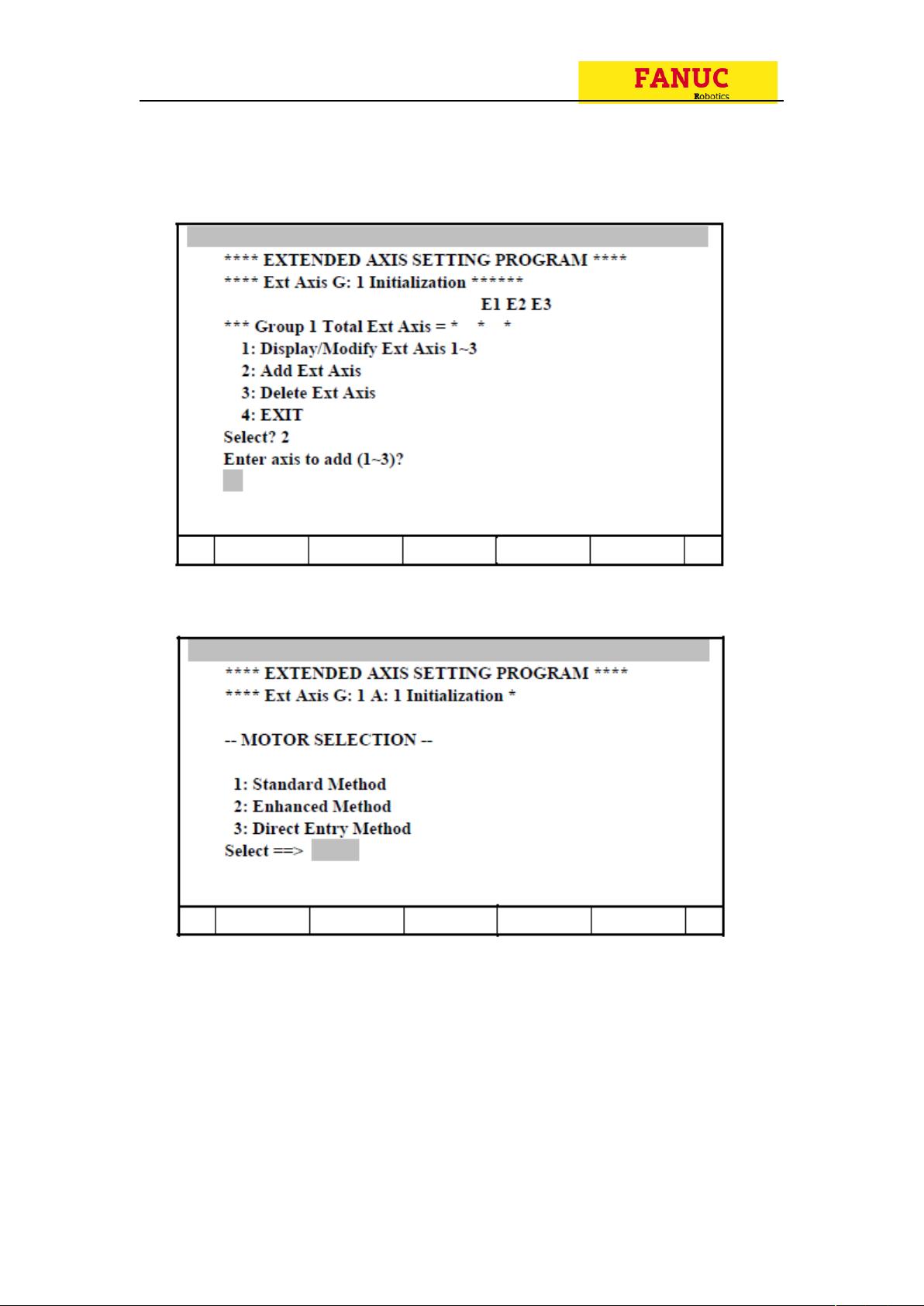
5. 设定与所选群组的附加轴相关的硬件开始轴号码。
6. 显示与所选组的附加轴相关的信息。
剩余13页未读,继续阅读
资源评论













